2024年7月1日
Bitbakeのディストリビューション
目次: Yocto
Yocto Scarthgap(5.0.1)のメモです。前回同様、コードを読んで依存関係を調べるのは大変時間が掛かるので、簡易的な調査手法として全ファイルを消してエラーを観察し、エラーの原因となるファイルを復活させて次ステップに進める手段を用います。
引き続きBitbakeを実行してエラーを見て、足りないファイルを元に戻していくという方法で各パーツや設定の動作を見ていきたいと思います。
ディストリビューションが見つからないエラー
$ bitbake core-image-sato
ERROR: OE-core's config sanity checker detected a potential misconfiguration.
Either fix the cause of this error or at your own risk disable the checker (see sanity.conf).
Following is the list of potential problems / advisories:
DISTRO 'poky' not found. Please set a valid DISTRO in your local.conf
新たなディストリビューション(DISTRO, distribution)という用語が出てきました。Yoctoのドキュメント(Creating Your Own Distribution - The Yocto Project)には特に用語の説明がないのですが、一般的なLinuxディストリビューションと同じ意味、つまり「Linuxカーネルと周辺ソフトウェアを1つにまとめたもの」を意味していると思われます。
ビルドディレクトリbuild/conf/local.confに下記の記述があり、デフォルトのディストリビューションはpokyとなります。
デフォルトのディストリビューションの定義位置
## build/conf/local.conf
...(略)...
# Default policy config
#
# The distribution setting controls which policy settings are used as defaults.
# The default value is fine for general Yocto project use, at least initially.
# Ultimately when creating custom policy, people will likely end up subclassing
# these defaults.
#
DISTRO ?= "poky"
ちなみに環境変数による設定は上書きできます。DISTROに限らず他の変数も同様です。
ディストリビューションの上書き指定
$ DISTRO=something bitbake core-image-sato
ERROR: OE-core's config sanity checker detected a potential misconfiguration.
Either fix the cause of this error or at your own risk disable the checker (see sanity.conf).
Following is the list of potential problems / advisories:
DISTRO 'something' not found. Please set a valid DISTRO in your local.conf
Yoctoのドキュメントによれば、conf/distroの下にある"distro名.conf"がdistribution configuration fileなので、poky用ならばconf/distro/poky.confが該当します。探すとmeta-poky/conf/distroの下にpoky.confがありました。このファイルも元に戻します。
poky-sanityクラスが見つからないエラー(pokyディストリビューション用)
$ bitbake core-image-sato
ERROR: Unable to parse /home/katsuhiro/share/projects/oss/poky/bitbake/lib/bb/parse/parse_py/BBHandler.py
Traceback (most recent call last):
File "/home/katsuhiro/share/projects/oss/poky/bitbake/lib/bb/parse/parse_py/BBHandler.py", line 71, in inherit(files=['poky-sanity'], fn='configuration INHERITs', lineno=0, d=<bb.data_smart.DataSmart object at 0x7fb98c543910>, deferred=False):
if not os.path.exists(file):
> raise ParseError("Could not inherit file %s" % (file), fn, lineno)
bb.parse.ParseError: ParseError in configuration INHERITs: Could not inherit file classes/poky-sanity.bbclass
再びクラスが見つからないと言われています。どうもpokyディストリビューションだけで使っているクラスがあるようですので、該当するファイルも合わせて元に戻します。
今回登場したファイル、ディレクトリは、
- meta-poky/conf/distro/poky.conf
- meta-poky/classes/*.bbclass
こんなとこ。次回はレシピを見ます。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2024年6月27日
何もない組み込み環境でDOOMを動かす - その4 - 自作OSの組み込み環境へ移植
目次: RISC-V
目次: 独自OS
DOOMのクローン実装prboom2を組み込み環境に移植する話です。前回は画面描画を1.5倍ほど高速化しました。
組み込み環境の選択
今まで「組み込み環境」とひとまとめにして呼んでいましたが、OSだけでもLinux、RTOS、もっとシンプルなものも含めると無数にあります。既存のOSの上で動かすのも大変興味深いですが、今回は自作OS(2022年12月14日の日記参照)の上で動かしてみたいと思います(リポジトリへのリンク)。
今まで下記の機能を削除したり、代替機能で置き換えてきたのはこのためです。動作させるボードやSoCにHW機能がない場合もあれば、自作OSにドライバを実装しておらずHW機能があっても自作OSから使う方法がないのです。
- SDL: 削除
- サウンド機能: 削除
- ジョイスティック入力: 削除
- ファイルアクセス機能: 削除
- 画面描画機能: UARTを使った描画で代替
自作OSの特徴は下記のようにLinuxと同じlibcを採用して、Linuxのアプリケーションを移植しやすい仕組みになっていることです。速度の遅い組み込み環境で何度も動作確認するのは大変ですから、なるべくLinux上で検証できるようにした構成です。
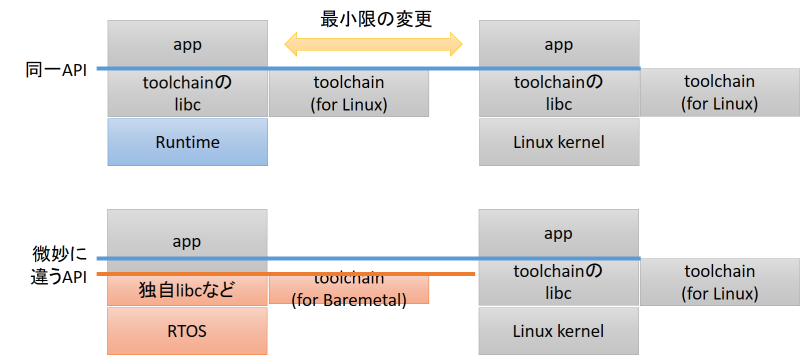
今回のprboom2の移植の際もC言語のコードを弄る必要はありませんでした。ビルドシステムというかMakefileを別途作っていますが、なんでだったか忘れました……。
自作OSで動かす
自作OSのランタイム側のビルドのための準備については、ドキュメント(リンク)を見ていただくとして。QEMU RISC-V 32bit向けに自作OSをビルドします。
自作OSのビルド
$ cd baremetal_crt $ cmake ./ -G Ninja -B build \ -DCMAKE_BUILD_TYPE=RelWithDebInfo \ -DCMAKE_INSTALL_PREFIX=./test/sysroot/ \ -DARCH=riscv \ -DCROSS_COMPILE=riscv64-unknown-elf- \ -DCC=gcc \ -DDEFCONF=riscv_qemu_virt_32_xip $ ninja -C build install
次に改造prboom2をビルドします。前回まで説明してきた改造を全て適用したprboom2をGitHubに置いた(リンク)ので、このコードを使うと簡単です。実装が適当かつ書きかけのコードとかが残っていて美しくありませんが、細かいことは気にしないでください……。
prboom2 on 自作OSのビルド
$ cd prboom2 $ ./configure --disable-gl $ cd src/riscv $ make USE_NEWLIB=y USE_SYSROOT=(baremetal_crtのパス)/test/sysroot all
最初のconfigureはconfig.hを作成するために実行しています。特にconfig.hを変更する予定はないので固定で置いてしまえば良かったんじゃないか?と思いましたけど、まあいいでしょう。
prboom2 on 自作OSの動作確認
$ qemu-system-riscv32 \ -machine virt \ -bios none \ -net none \ -nographic \ -chardev stdio,id=con,mux=on \ -serial chardev:con \ -mon chardev=con,mode=readline \ -smp 4 \ -s -kernel prboom2/src/riscv/prboom
こんな感じで動作確認できます。
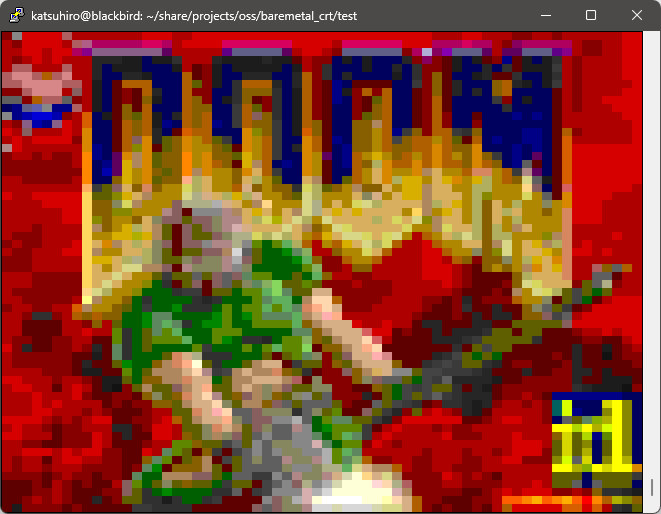
描画速度を稼ぐため解像度を半分にしている以外、見た目が前回まで(つまりLinuxで動作させたとき)と同じなのであまり面白くないですね……。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年6月26日
何もない組み込み環境でDOOMを動かす - その3 - 描画の高速化
目次: RISC-V
DOOMのクローン実装prboom2を組み込み環境に移植する話です。前回はUARTしかないショボい組み込み環境でも動作できるようにprboom2を改造しました。
UARTによる画面描画の問題点
Linuxの仮想端末は超速いので描画速度はあまり気になりませんが、組み込み機器に移植すると描画がめちゃくちゃ遅いことに気づくと思います。理由は簡単でUARTが遅いからです。UARTは9600bps〜115.2kbpsがよく使われる速度で、速いものでもせいぜい1.5Mbps程度です。
前回の実装では24bit色モードを使ったので、1つのピクセルを表現するために、エスケープシーケンス16バイト+スペース2バイト = 18バイト必要です。128x120の画面を1枚表示するのに276kB必要、9600bpsだと230秒(0.0043fps)、1.5Mbpsでも1.47秒(0.67fps)です。
256色モードで軽量化
端末の背景色設定は24bit色モードと256色モードがあります。256色モードの場合、エスケープシーケンス10バイト+スペース2バイト = 12バイトなので、24bit色より多少は軽量です。128x120の画面を1枚表示するのに184kB必要です。1.5Mbpsで0.98秒(1.01fps)ですね。
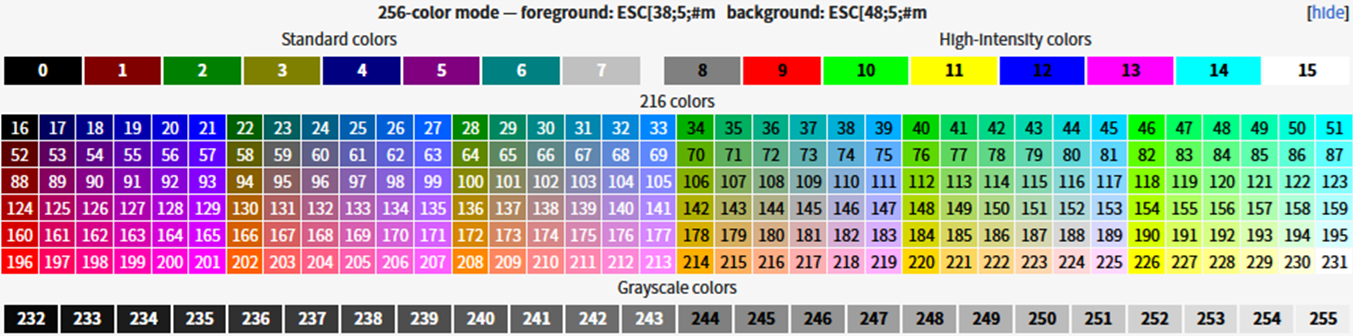
24bit色モードはエスケープシーケンスでR, G, Bの各値を指定できるのでどんな色でも指定できました。256色モードの場合はパレットの各色に番号が振られていて、エスケープシーケンスで番号を指定する仕組みです。カラーパレットは上記の配置で固定されていてパレットにない色は使えません。
DOOMの画面の各ピクセルの色を見て、256色モードパレットの色を指す番号を探す減色処理を追加します。256色モードのカラーパレット番号と色の関係は規則的です(※)から、それほど難しくないでしょう。

256色モードだとこんな感じです。24bit色版と比較するとややディティールが潰れていて黒っぽいですけど、まあまあ良さそうです。
(※)16-231番(216色)はR, G, Bそれぞれ6段階の組み合わせです。パレット番号を表す式は、16 + 36r + 6g + b (0 <= r, g, b <= 5) となっています。
横方向RLE
もう少し軽くできないか考えてみましょう。今は毎回「背景色変更のエスケープシーケンス + スペース2つ」を出力していますが、左隣のピクセルと色が同じピクセルであれば、背景色変更をする必要はないです。
つまり左隣と同じ色のピクセルが連続する限りエスケープシーケンスの出力を省略できます。非常に単純なRLE(Run-Length Encoding)の一種とも言えましょう。
グレースケールの活用
デモ開始直後のところがわかりやすいですが、256色モードで描画すると真っ黒になってしまう画面が散見されます。
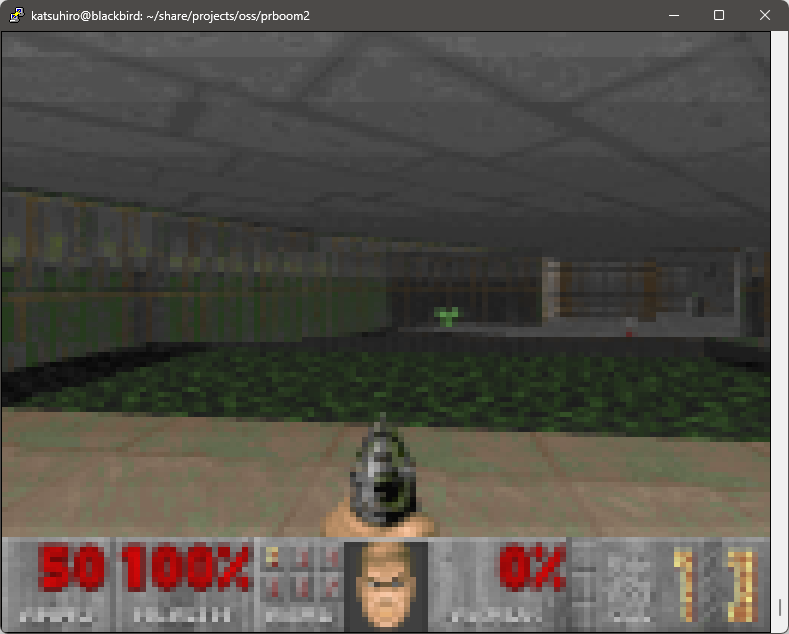

DOOMの画面は比較的暗い色が多いですが、256色モードのパレットは暗い色から明るい色まで均等に割り振られているため、暗い色の表現力が低いです。単純に近似すると画面の色がほぼ真っ黒になります。
この問題を回避するために暗い色をグレースケールに置き換えます。グレースケールと暗い赤、緑、青は違う色ですが、暗い色の色味は区別しづらいのでグレースケールに置き換えてもさほど不自然にはなりません。

こんな感じです。良く見ると壁の暗い緑がグレーになっていたり若干変ですが、総じて悪くない仕上がりです。これで256色モードが活用でき、24bit色モードに比べて描画速度が1.5倍以上になりました。
今まではずっとLinuxの上で作業してきましたが、次回でようやく組み込み機器に移植します。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2024 | > | ||||
| << | < | 07 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | 1 | 2 | 3 | 4 | 5 | 6 |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 | - | - | - |
最近のコメント20件
-
 14年6月13日
14年6月13日
2048player...さん (09/26 01:04)
「最後に、この式を出すのに紙4枚(A4)も...」 -
14年6月13日
2048playerさん (09/26 01:00)
「今のところ最も簡略化した式です。\n--...」 -
14年6月13日
2048playerさん (09/16 01:00)
「返信ありがとうございます。\nコメントが...」 -
14年6月13日
すずきさん (09/12 21:19)
「コメントありがとうございます。同じ結果に...」 -
14年6月13日
2048playerさん (09/08 17:30)
「私も2048の最高スコアを求めたのですが...」 -
14年6月13日
2048さん (09/08 17:16)
「私も2048の最高スコアを求めたのですが...」 -
14年6月13日
2048playerさん (09/08 16:10)
「私も2048の最高スコアを求めたのですが...」 -
02年8月4日
lxbfYeaaさん (07/12 10:11)
「555」 -
24年6月17日
すずきさん (06/23 00:12)
「ありがとうございます。バルコニーではない...」 -
24年6月17日
hdkさん (06/22 22:08)
「GPSの最初の同期を取る時は見晴らしのい...」 -
24年5月16日
すずきさん (05/21 11:41)
「あー、確かにdpkg-reconfigu...」 -
24年5月16日
hdkさん (05/21 08:55)
「システム全体のlocale設定はDebi...」 -
24年5月17日
すずきさん (05/20 13:16)
「そうですねえ、普通はStandardなの...」 -
24年5月17日
hdkさん (05/19 07:45)
「なるほど、そういうことなんですね。Exc...」 -
24年5月17日
すずきさん (05/19 03:41)
「Standardだと下記の設定になってい...」 -
24年5月17日
hdkさん (05/18 22:16)
「ドメインを変えたせいで別サイト扱いになっ...」 -
24年4月22日
hdkさん (04/24 08:36)
「うちのHHFZ4310は15年突破しまし...」 -
24年4月22日
すずきさん (04/24 00:37)
「ちゃんと数えてないですけど蛍光管が10年...」 -
24年4月22日
hdkさん (04/23 20:52)
「おお... うちのHHFZ4310より後...」 -
20年6月19日
すずきさん (04/06 22:54)
「ディレクトリを予め作成しておけば良いです...」
最近の記事3件
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
