2021年6月17日
Raspberry Pi 3のオーディオ その8 - シミュレーションと実測値の差(解決編)
目次: Raspberry Pi
Raspberry Pi 3のAudio Outの最後の謎がわかりました。
- PWMのDuty比100%を維持したときに減衰する速度が異なります。
その6(2021年5月12日の日記参照)にてRaspberry Pi 3の回路図が間違っているのでは?と疑っていましたが、違いました。ケーブルに入っている抵抗のせいでした。
抵抗入りケーブル
今まで測定に使用していたオーディオケーブルにはプラグ内に抵抗が入っています。そもそもなんでこんなの買ったんだろ……?プラグの見た目からはわかりませんので、テスターで各端子間の抵抗を計測した結果は下記のとおりです。
| ミニL | ミニR | ミニG | RCA L | RCA G | RCA R | RCA G | |
|---|---|---|---|---|---|---|---|
| ミニL | --- | 294 | 147 | 46.7k | 147 | 46.7k | 147 |
| ミニR | --- | 147 | 47.0k | 147 | 46.4k | 147 | |
| ミニG | --- | 47.0k | 0 | 47.0k | 0 | ||
| RCA L | --- | 47.0k | 94.0k | 47.0k | |||
| RCA G | --- | 47.0k | 0 | ||||
| RCA R | --- | 47.0k | |||||
| RCA G | --- |
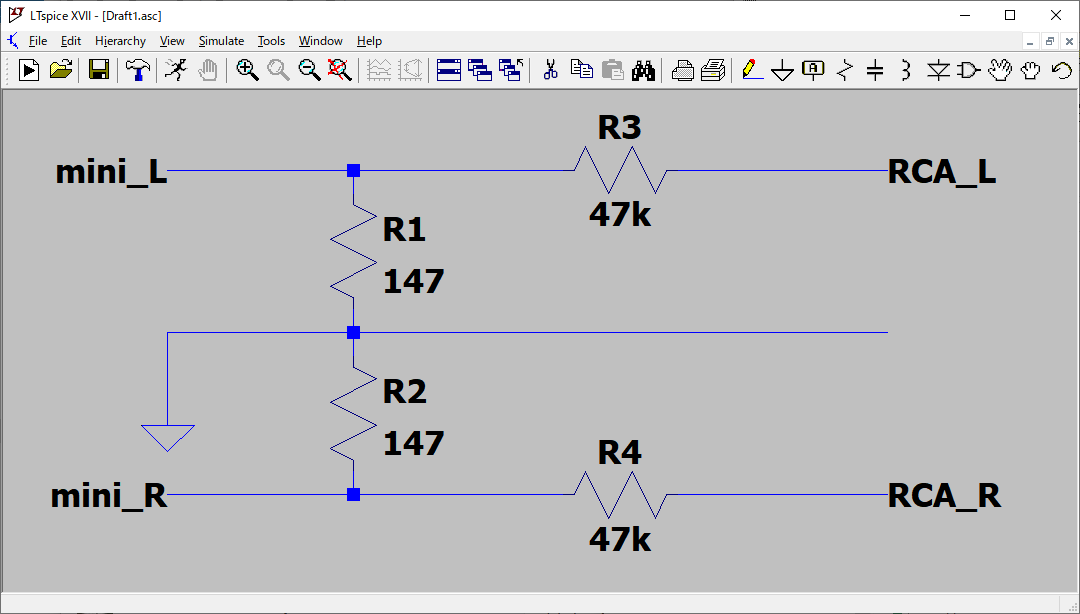
測定結果から想定される回路図です。左がミニジャック側、右がRCAプラグ側です。
再度シミュレーション
この結果を踏まえてシミュレーションすると実測値とほぼ一致しました。
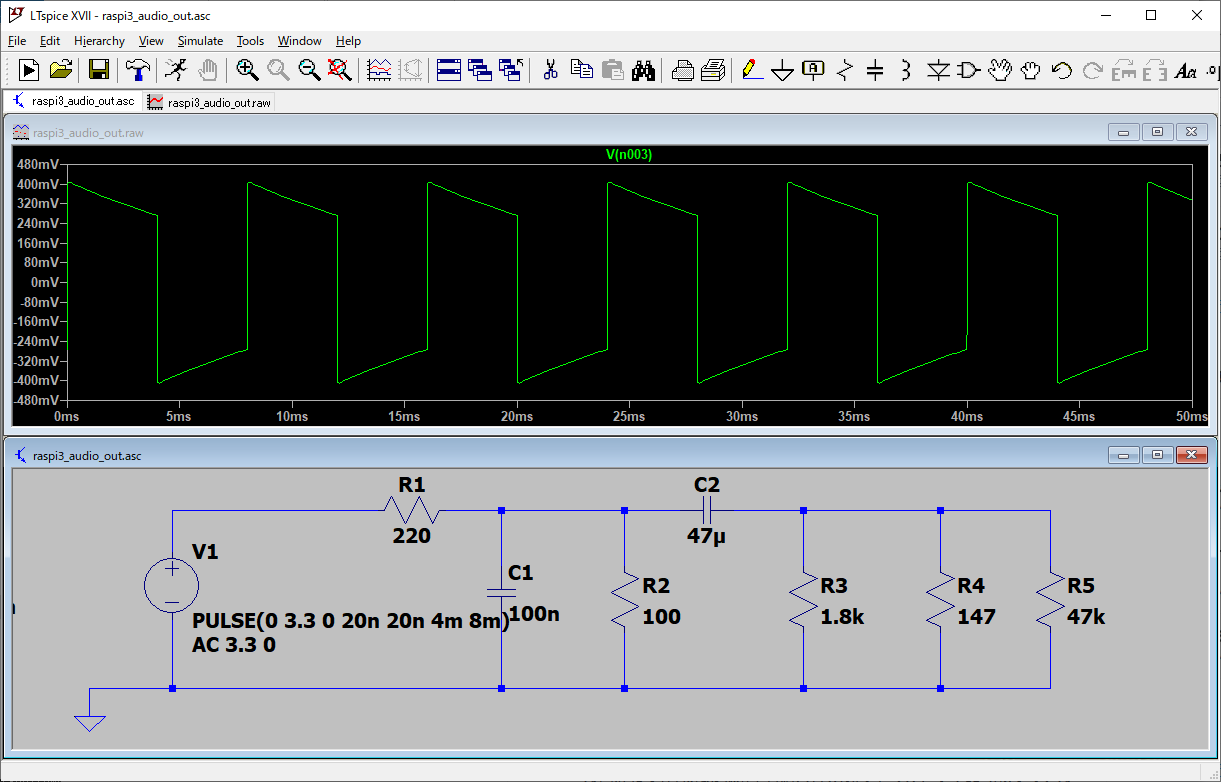
![]()
Audio Out回路のシミュレーション結果(125Hz矩形波を入力に設定)ケーブルの抵抗を考慮
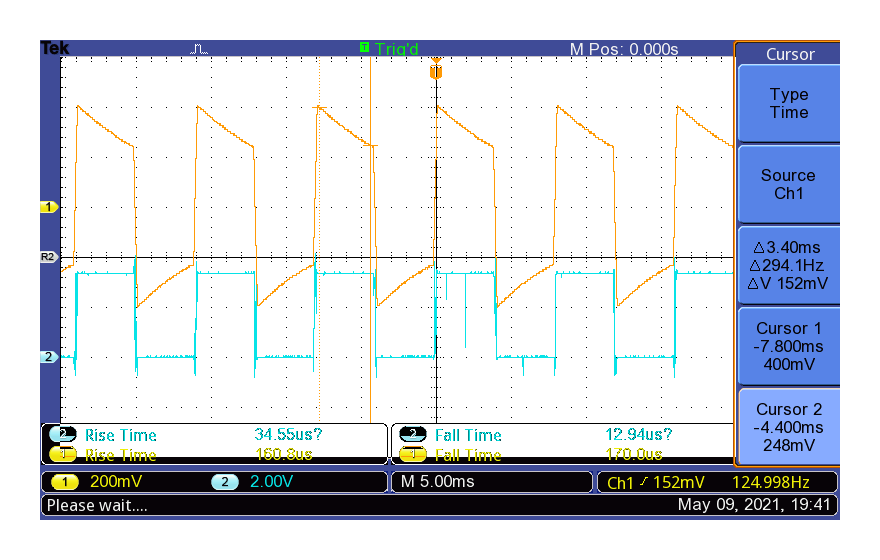
Audio Out回路の実測値(黄色Audio Out、水色PWM信号125Hz矩形波)
気づいてみれば何とも初歩的なミスでしたが、ケーブルは0Ωと思い込んで見落としました。他人(RasPiの回路図)を疑う前に自分を疑えという良い教訓ですね〜。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2021年6月10日
HiFive Unmatched用のSSD購入
目次: RISC-V
買い物メモです。先日(2021年5月28日の日記参照)SiFive HiFive Unmatchedを購入しました。このボードはmicroSDからブートしますが、追加のストレージとしてNVMe SSDが装着できます。
Western DigitalのWDS100T2B0C-ECを購入しました。Amazonで13,000円くらいでした。容量1TB、規格M.2 2280、接続NVMeです。コストパフォーマンス重視のWD Blueシリーズです。
WD BlueシリーズはWD Blackシリーズと比較すると速度で見劣りするものの、そもそもHiFive UnmatchedのCPUはそれほど速くないですしWD Blueで十分でしょう。きっと。
コメント一覧
- コメントはありません。
この記事にコメントする
2021年6月8日
OpenCLのOSS実装poclを調べる その5 - デバイスの初期化
目次: OpenCL
引き続き、独自アクセラレータのテンプレート実装pocl/lib/CL/devices/accelの細かな問題を調べます。次の問題はOpenCLの初期化です。clGetPlatformIDs() から初期化関数pocl_accel_init() に辿り着いたところでabort() が呼ばれクラッシュします。
/dev/memを開く際のエラーログ
| GENERAL | accel: accelerator at 0x1000 with 0 builtin kernels Could not open /dev/mem
テンプレート実装の意図としては /dev/memをopen() してメモリマップされたハードウェアのレジスタを読み書きしたいようです。今回は実際のハードウェア相手ではないので、レジスタの読み書きではなく /dev/memの代わりにバイナリファイルを開いてもらうように書き換えます。
/dev/memを開く処理
// pocl/lib/CL/devices/accel/accel.cc
cl_int pocl_accel_init(unsigned j, cl_device_id dev, const char *parameters) {
...
POCL_MSG_PRINT_INFO("accel: accelerator at 0x%zx with %zu builtin kernels\n",
D->BaseAddress, D->SupportedKernels.size());
int mem_fd = open("/dev/mem", O_RDWR | O_SYNC);
if (mem_fd == -1) {
POCL_ABORT("Could not open /dev/mem\n"); //★★このabortでクラッシュ
}
...
ファイル名を書き換えて突破するとデバイスが持っているメモリのサイズを取得し、メモリマップしようとする部分で怒られます。
メモリマップのエラーログ
| GENERAL | accel: accelerator at 0x1000 with 0 builtin kernels a.out: ../lib/CL/devices/accel/accel.cc:196: void MMAPRegion::Map(size_t, size_t, int): Assertion `Data != MAP_FAILED && "MMAPRegion mapping failed"' failed.
サイズを取得している箇所は下記のとおりです。
メモリサイズを取得する処理
// pocl/lib/CL/devices/accel/accel.cc
cl_int pocl_accel_init(unsigned j, cl_device_id dev, const char *parameters) {
...
uint32_t ctrl_size = D->ControlMemory.Read32(ACCEL_INFO_CTRL_SIZE);
uint32_t imem_size = D->ControlMemory.Read32(ACCEL_INFO_IMEM_SIZE);
uint32_t dmem_size = D->ControlMemory.Read32(ACCEL_INFO_DMEM_SIZE);
uint32_t pmem_size = D->ControlMemory.Read32(ACCEL_INFO_PMEM_SIZE);
uint32_t max_region =
std::max(std::max(ctrl_size, imem_size), std::max(dmem_size, pmem_size));
D->InstructionMemory.Map(D->BaseAddress + max_region, imem_size, mem_fd);
...
バイナリファイルを書き換えて何か適当な値が読めるようにしてやりすごすか、面倒ならばD->ControlMemory.Write32(ACCEL_INFO_CTRL_SIZE, 0x2000); のように固定値を書いておくと次に進みます。今は実際のデバイスが相手ではないので、とりあえず先に進めて後で考えましょう。
コメント一覧
- コメントはありません。
この記事にコメントする
2021年6月7日
GTKのウインドウサイズ変更がシビアすぎる
目次: Linux
TwitterでGUIの話をしている人を見かけて思い出した話です。私はGNU/Debian LinuxのGUIをLightDM + GTKにして使っています。
GUIにこだわりはなく一時期デフォルトだったLightDMを使い続けているだけです。デフォルトになっただけあって、良くできていると思うし特に不満はないです……が、1点だけ言わせてもらえば、ウインドウサイズ変更の判定が厳しすぎませんか?
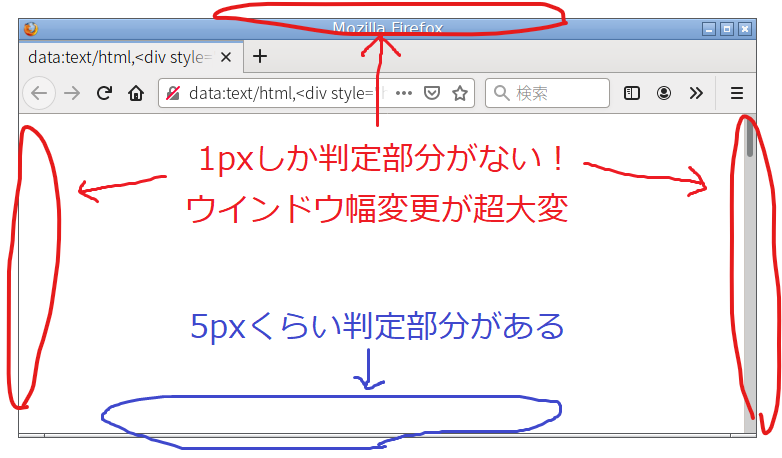
特に左辺、上辺、右辺が1pxしか反応してくれないので、マウス操作が非常にシビアです。手が震えてきます。
操作が良くない
Twitterで上記の話をしていたところ、Alt + 右マウスボタンでウインドウサイズを変えられるよ、と教えてもらいました。今度からそうします。1pxに合わせるのは手が疲れる……。
コメント一覧
- コメントはありません。
この記事にコメントする
2021年6月6日
Zephyr on HiFive Unleashed
目次: Zephyr
JTAGが繋がった(2021年6月5日の日記参照)記念にZephyrをHiFive Unleashedで動かしてみました。使うハードウェアはUARTだけ、コードもJTAGでITMにロードして動作させるだけなら楽勝だろと思いきや、全然UARTから文字が出力されず1日掛かってしまいました。
Zephyr on HiFive UnleashedのUARTログ
*** Booting Zephyr OS build zephyr-v2.6.0-39-g2bf63134e8f0 *** thread_a: Hello World from cpu 0 on hifive_unleashed! thread_b: Hello World from cpu 0 on hifive_unleashed! thread_a: Hello World from cpu 0 on hifive_unleashed! thread_b: Hello World from cpu 0 on hifive_unleashed! thread_a: Hello World from cpu 0 on hifive_unleashed! thread_b: Hello World from cpu 0 on hifive_unleashed!
原因はコアのPLL設定が間違っていて、コアクロックから分周して作るUARTのボーレートもおかしな周波数になっていたからです。
FU540のリセット直後は外部クロック源(33.33MHz)をそのまま使って動きます。起動後PLLを1GHz(33.33 / 1 * 120 / 4 = 999.9MHz)に設定し、コアクロックをPLL側に切り替えなければなりません。
PLLの設定はFSBLという2段目のブートローダーが行うので、通常はOSが気にする必要はありません。しかしRTOSは大抵ブートローダーを経由しませんから、ブートローダーに隠れた設定も拾ってきて実装しないと動かないことがあります。
ブートローダーがあって当たり前のリッチ系SoCでRTOSを動かそうとすると、大抵この「暗黙のうちに設定されている何か」が抜け落ちて動かなかったりおかしくなったり、何かと面倒が起きます。
幸いなことにSiFiveのブートローダーはコードが公開されており、完全ブラックボックスのSoCと比べれば、難易度は低い部類です。ありがたいですね。
メモ: 技術系の話はFacebookから転記しておくことにした。加筆。
コメント一覧
- コメントはありません。
この記事にコメントする
2021年6月5日
今更HiFive UnleashedのJTAGに気づいた
目次: RISC-V
昔買ったHiFive Unleashedというボード、JTAGはちょっと特殊なコネクタが必要だと思っていて接続を諦めていました。ところが今日、ファンを掃除したあと動作確認をした際に、USB Serialと一緒にUSB JTAGも用意されていることに気づきました。
HiFive Unleashedはディスコンでもう手に入りませんし、後継機種のHiFive Unmatchedも買った今となっては、かなり今更感ありますが……。
ちょっと試したところ、簡単にOpenOCDが繋がりSMPモードにすると5コア(rv64imacなE51とrv64gcなU54 x 4)が見えました。
HiFive Unleashed用のOpenOCDコンフィグ
adapter speed 10000
adapter driver ftdi
ftdi_device_desc "Dual RS232-HS"
ftdi_vid_pid 0x0403 0x6010
ftdi_layout_init 0x0008 0x001b
ftdi_layout_signal nSRST -oe 0x0020 -data 0x0020
set _CHIPNAME riscv
jtag newtap $_CHIPNAME cpu -irlen 5 -expected-id 0x20000913
set _TARGETNAME $_CHIPNAME.cpu
target create $_TARGETNAME.0 riscv -chain-position $_TARGETNAME -rtos hwthread
target create $_TARGETNAME.1 riscv -chain-position $_TARGETNAME -coreid 1
target create $_TARGETNAME.2 riscv -chain-position $_TARGETNAME -coreid 2
target create $_TARGETNAME.3 riscv -chain-position $_TARGETNAME -coreid 3
target create $_TARGETNAME.4 riscv -chain-position $_TARGETNAME -coreid 4
target smp $_TARGETNAME.0 $_TARGETNAME.1 $_TARGETNAME.2 $_TARGETNAME.3 $_TARGETNAME.4
init
halt
SiFiveのSoCはFU540も後継のFU740も命令セットの違うコアを混載するのが好きですね。混載は良いとしてせめて同じ命令セットにしてほしかったです。単純なSMPしか持ってないOSだと制御できないじゃん……。
メモ: 技術系の話はFacebookから転記しておくことにした。加筆。
コメント一覧
- コメントはありません。
この記事にコメントする
2021年6月4日
OpenCLのOSS実装poclを調べる その4 - デバイスのパラメータを渡す環境変数
目次: OpenCL
引き続き、独自アクセラレータのテンプレート実装pocl/lib/CL/devices/accelの細かな問題を調べます。デバイス数の取得の問題を回避すると、次はデバイスのパラメータを渡す問題に遭遇します。
デバイスのパラメータを渡す環境変数名を決める処理
// pocl/lib/CL/devices/accel/accel.cc
void pocl_accel_init_device_ops(struct pocl_device_ops *ops) {
ops->device_name = "accel"; //★★デバイス名はaccel
ops->init = pocl_accel_init;
...
// pocl/lib/CL/devices/devices.c
cl_int
pocl_init_devices ()
{
...
dev_index = 0;
/* Init infos for each probed devices */
for (i = 0; i < POCL_NUM_DEVICE_TYPES; ++i)
{
if (pocl_devices_init_ops[i] == NULL)
continue;
str_toupper (dev_name, pocl_device_ops[i].device_name); //★★dev_nameはデバイス名を大文字に変換したACCELになる
assert(pocl_device_ops[i].init);
for (j = 0; j < device_count[i]; ++j)
{
...
/* Check if there are device-specific parameters set in the
POCL_DEVICEn_PARAMETERS env. */
POCL_GOTO_ERROR_ON (
(snprintf (env_name, 1024, "POCL_%s%d_PARAMETERS", dev_name, j) //★★環境変数名を生成する箇所
< 0),
CL_OUT_OF_HOST_MEMORY, "Unable to generate the env string.");
errcode = pocl_devices[dev_index].ops->init (
j, &pocl_devices[dev_index], getenv (env_name));
...
実装ではpocl_accel_init() にて環境変数の値をパースしてデバイスのパラメータを取得します。環境変数名はデバイス番号によって変化しますが、0番目のデバイスであればPOCL_ACCEL0_PARAMETERSという名前になります。環境変数名は上記にあるとおりpocl_init_devices() で決めています。
困ったことに環境変数が見つからないとabort() してしまうので、環境変数には最低でも何か1つ数値を渡す必要があります。なお1つ目の値はレジスタ領域のベースアドレスだと解釈されるようです。
他の実装(pthreadとcuda)は環境変数を使わないので、同様の問題は存在しません。最終的にはaccelも環境変数に頼らない実装に変えていく必要がありますが、今はそのままにしておきます。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2021 | > | ||||
| << | < | 06 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | - | 1 | 2 | 3 | 4 | 5 |
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | - | - | - |
最近のコメント5件
最近の記事20件
-
 23年5月15日
23年5月15日
すずき (07/22 03:04)
「[車 - まとめリンク] 目次: 車三菱 FTO GPX '95の話。群馬県へのドライブ1群馬県へのドライブ2将来車を買い替え...」 -
26年7月22日
すずき (07/22 03:04)
「[ジャガーさんの冷却水漏れの修理見積もり] 目次: 車先週、冷却水がほぼなくなってしまい修理工場にレッカーしたジャガーさんです...」 -
26年7月14日
すずき (07/22 02:37)
「[ジャガーさんの冷却水漏れ] 目次: 車朝、出勤しようと思ってエンジンをかけたところ冷却水不足と表示されました。わぁ、ついに出...」 -
26年7月19日
すずき (07/20 04:04)
「[ゲームを買ったら遊びましょう4] 目次: ゲーム前回の振り返り(2025年12月22日の日記参照)から半年経ちました。Swi...」 -
21年12月28日
すずき (07/20 04:03)
「[ゲーム - まとめリンク] 目次: ゲームNintendo DSを買ったパネルでポンDS最近の朝はパネポンDS聖剣伝説DSチ...」 -
26年7月13日
すずき (07/19 23:33)
「[Flightradar24のcontributorになる方法] 目次: 自宅サーバーADS-Bを受信できる環境があればFli...」 -
23年6月1日
すずき (07/19 23:31)
「[自宅サーバー - まとめリンク] 目次: 自宅サーバーこの日記システム、Wikiの話。カウンターをPerlからPHPに移植日...」 -
23年9月11日
すずき (07/15 12:18)
「[Windows - まとめリンク] 目次: WindowsWindows XPのブリッジ機能colinuxとWindowsの...」 -
25年1月31日
すずき (07/15 12:18)
「[Windowsの日本語フォントはみな長生き] 目次: WindowsGNOME48からフォントが変わるニュースを見ていて、フ...」 -
26年7月11日
すずき (07/12 01:26)
「[Timberborn、トロフィーコンプ] 目次: ゲームTimberbornのトロフィーをコンプリートしました。アーリーアク...」 -
24年2月7日
すずき (07/11 13:05)
「[複数の音声ファイルのラウドネスを統一したい] 目次: PythonPCやデジタル音楽プレーヤーで音楽を聞いていると、曲によっ...」 -
26年6月27日
すずき (07/08 01:45)
「[ジャガーさんのバンパー修理] 目次: 車以前(2025年11月21日の日記参照)、ジャガーさんの左前をぶつけてバンパーをガリ...」 -
26年7月3日
すずき (07/08 00:42)
「[ADS-Bを受信して飛行機の位置を見よう] 目次: 自宅サーバー空を飛ぶ飛行機は離陸直後や着陸寸前でもない限り飛んでいる姿は...」 -
26年7月1日
すずき (07/04 02:37)
「[GPSは世界一正確な時計、その3 - ntpsecとgpsd] 目次: 自宅サーバー以前(2015年5月8日の日記参照)、G...」 -
26年6月26日
すずき (07/03 05:23)
「[ジャガーさんの不思議なシフト] 目次: 車ジャガーXE(前期型)はシフトがダイヤル型になっていて、P, R, N, D, S...」 -
20年2月22日
すずき (06/26 02:03)
「[Zephyr - まとめリンク] 目次: Zephyr導入、ブート周りHello! Zephyr OS!!Hello! Ze...」 -
26年6月18日
すずき (06/26 02:02)
「[ZephyrのOut-of-treeアプリケーションその6 - シリアル出力] 目次: Zephyr前回はシリアルに文字を出...」 -
26年6月23日
すずき (06/26 01:27)
「[ANA国内線予約サイトが悲惨なことに] 4月くらいにANAの国内線予約サイトが国際線と共通のクラウドシステム(Amadeus...」 -
26年6月11日
すずき (06/26 01:10)
「[ZephyrのOut-of-treeアプリケーションその5 - OpenOCDとGDBで実行] 目次: Zephyr前回Ze...」 -
26年4月29日
すずき (06/24 01:10)
「[ぽこあポケモンをクリア] 目次: ゲーム1日だけやって放置していたぽこあポケモンをクリア(=スタッフロールが流れるイベントを...」
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 2026年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:

{kind=link}