 未来から過去へ表示(*)
未来から過去へ表示(*) 2024年1月7日
M5Stackとesp32とArduino
目次: Arduino
M5Stackというボードが電子工作に便利らしいという話を聞き、M5 Core2とM5Stamp C3という小型のボードを買いました。Core2の方は機能豊富な分、お値段もそこそこ(8,000円くらい)します。M5Stampは安い(1,300円くらい)です。
開発環境
M5Stackのサイト(M5Stack document PLATFORMのページ)を見ると、AIなど特定用途向けを外すと開発環境は4つあるようです。多いなあ。派閥争い中でしょうか。
- UIFlow
- Arduino IDE
- Micropython
- .NET nanoFramework
1番目に表示されているUIFlowが一番おススメなのでしょうけど、残念ながらUIFlowはM5Stamp C3に対応していないようです。2番目に表示されていたArduino IDEにしました。Arduino IDEを使うなら素直にArduinoボードを買った方が良かったかな、まあいいか。
M5Stamp C3はデバッグできない
M5StackシリーズはいずれもEspressifのESP32ファミリーのSoC(IoT向けの小規模SoC)を採用しています。CPUとSRAM、一通りの低速系I/O I2C, SPI, I2Sなどの他に、Wi-FiやBluetoothに対応していて素晴らしいSoCです。無線技術に強いEspressifならではですね。
私が購入したM5Stamp C3はESP32-C3というSoCを採用しています。ESP32シリーズの中でC3は割と後発らしく、CPUが従来のXtensaではなくRISC-Vに変更されています。
新しいせいかCPUアーキを変更したせいか知りませんが、Arduino IDEでデバッグしようとしてもOpenOCDが繋がらないとエラーが出てデバッグできないです。ログを全部載せると長いので別ファイル( ログ全部)にします。
ログ全部)にします。
Arduino IDEのOpenOCDエラー前後のログ(ボード: ESP32C3 Dev Module)
Debug: 215 114 command.c:155 script_debug(): command - init Debug: 216 115 command.c:155 script_debug(): command - target init Debug: 217 115 command.c:155 script_debug(): command - target names Debug: 218 115 command.c:155 script_debug(): command - esp32c3 cget -event gdb-flash-erase-start Debug: 219 115 command.c:155 script_debug(): command - esp32c3 configure -event gdb-flash-erase-start reset init Debug: 220 115 command.c:155 script_debug(): command - esp32c3 cget -event gdb-flash-write-end Debug: 221 115 command.c:155 script_debug(): command - esp32c3 configure -event gdb-flash-write-end reset halt Debug: 222 115 command.c:155 script_debug(): command - esp32c3 cget -event gdb-attach Debug: 223 116 target.c:1659 handle_target_init_command(): Initializing targets... Debug: 224 116 riscv.c:444 riscv_init_target(): riscv_init_target() Debug: 225 116 semihosting_common.c:107 semihosting_common_init(): Error: 226 131 esp_usb_jtag.c:642 esp_usb_jtag_init(): esp_usb_jtag: could not find or open device! ★JTAGが見つからない?? Debug: 227 131 command.c:545 run_command(): Command 'init' failed with error code -4 User : 228 131 command.c:608 command_run_line(): Error: 229 131 riscv.c:1755 riscv_get_gdb_arch(): Unsupported xlen: -1 Error: 230 131 esp_semihosting.c:67 target_to_esp_semihost_data(): Unknown target arch! Debug: 231 131 riscv.c:490 riscv_deinit_target(): riscv_deinit_target() Debug: 232 132 target.c:2225 target_free_all_working_areas_restore(): freeing all working areas
エラーの前後だけ切り出すとこんな感じです。JTAGデバイスが見つからんと言っているように見えますが、どうしたら良いか全くわかりません。しばらくはprintfデバッグするしかないようです。M5Stamp C3はM5Stackシリーズを初めて使う人が買うべきボードではなかった??
ArduinoとESP32ライブラリ
M5Stackについて書かれたブログやコードを見ていると、外部ライブラリ(AdaFruit, Lovyan GFXとか)を使う場合と、Arduino-ESP32ライブラリを使う場合があるようです。
Arduino-ESP32ライブラリのドキュメントはEspressifが公開しています(Arduino-ESP32 2.0.14 documentation)。このライブラリはOSSでGitHubにてソースコードが公開されています(Arduino core for the ESP32 - GitHub)。
どうやってライブラリを入れ替えるのかわかりませんけど、Arduinoライブラリの中を見ることはできそうです。ありがたいですね。
Arduino-ESP32ライブラリはESP32 IDF(IoT Development Framework)というEspressif独自APIのライブラリを使用して実装されているようです。ドキュメントはやはりEspressifが公開しています(ESP-IDF Programming Guide)。GitHubにてソースコードも公開されています(Espressif IoT Development Framework - GitHub)。
このライブラリはちゃんと見てないですが、バイナリ(*.a)しかない部分もあって若干意味不明に見えます……。まあライブラリの表面だけだとしてもソースコードがあってありがたいです。きっと。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2024年1月5日
令和6年能登半島地震災害への寄付
正月も元日から日本を揺るがした能登半島の震災ですが、令和6年能登半島地震災害義援金(日本赤十字社のサイト)、受付が始まってましたので寄付しました。何かの助けになると良いな……。

寄付したと言いふらすのは行儀が良くないと昔は思っていましたが、言いふらしても誰も不幸にならないし「みんなやってる」「みんなやろう」も広まるし、悪いことはないので積極的に言うようにしています。
メモ: 技術系?の話はFacebookから転記しておくことにした。追記あり。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年1月3日
VSCodeでRISC-Vボードをデバッグその4 - SSH Remote ExtensionでGDBをボードにアタッチ
目次: Linux
前回はLinuxマシン単独でGDBを使ってRISC-Vボードのデバッグを行うところまでを設定しました。
今回はその続きで、Visual Studio Code(以降VSCode)とSSH Remote Extensionを使ってGDBをOpenOCDに接続しRISC-Vボードをデバッグします。
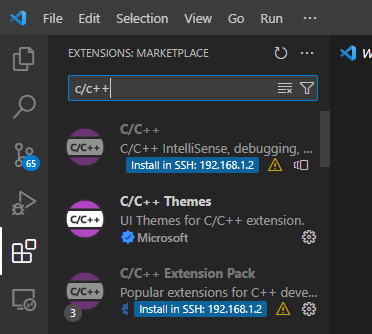
C/C++デバッグ用のExtensionをSSH接続先にインストールします。C/C++ Extension Packをインストールしておくのが便利だと思います。
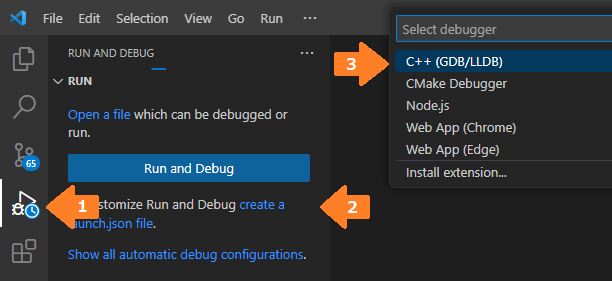
左側のActivity BarからRun and Debugを選択して(矢印1)、create a launch.json fileを押すと(矢印2)、デバッガを選べと言われるのでC++ (GDB/LLDB)を選択します(矢印3)。もしC++ (GDB/LLDB)が選択肢に現れない場合は、ソースコードウインドウを全部閉じてからもう一度やってください。
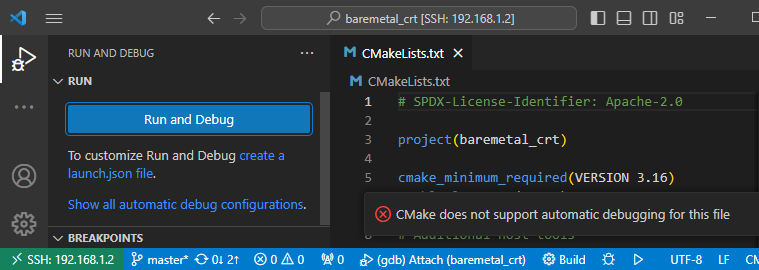
C言語ではないファイルを開いてRun and Debugやcreate a launch.json fileを押すと選択肢が変わるので注意してください。例えばCMakeLists.txtを開いてRun and Debugを押すと"CMake does not support automatic debugging for this file"とエラーが表示されるだけで何も起きません。
VSCodeは何もファイルを開いていなければ使用可能なデバッガを全て列挙し、開いているファイルがあればそのファイルに対して使用可能なデバッガだけを表示するようです。この仕様は初見だと分かりにくいですね……慣れたら便利なのかなあ?
Linuxマシン側の準備
詳細はその2(2023年12月30日の日記参照)にて紹介していますので、ダイジェストでお送りします。
ボードとSSH接続先のLinuxマシンを接続します。メニューの[Terminal] - [New Terminal]で1つ目の端末を開いてOpenOCDを起動します。
OpenOCDの起動
$ sudo openocd -c 'bindto 0.0.0.0' -f tcl/interface/jlink.cfg -f tcl/board/sifive-hifive1-revb.cfg
メニューの[Terminal] - [New Terminal]で2つ目の端末を開いてGDBを起動し、実行ファイルをロードします。launch.jsonの"program"で指定した実行ファイルをロードしてください。
GDBの起動
$ riscv64-zephyr-elf-gdb build/zephyr/zephyr.elf (gdb) target remote localhost:3333 (gdb) monitor reset halt (gdb) load (gdb) continue
UARTを見てRISC-Vボードが正常に動作していることを確認します。
UARTの確認
$ pyserial-miniterm /dev/ttyACM0 115200 --raw
ここまで確認出来たらいよいよVSCodeからGDBを起動できます。長かったですね。
デバッガの設定
先ほど紹介したcreate a launch.jsonを選択するとGDBを起動する設定が生成されます。
生成されたlaunch.json
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": []
}
が、バグっているのか何なのか、ほぼ何も書かれていないlaunch.jsonが生成されます。なぜ……?無いものは仕方ないので、
launch.jsonに追記
{
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) Attach",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/zephyr/zephyr.elf",
"cwd": "${workspaceFolder}",
"MIMode": "gdb",
"miDebuggerPath": "/home/katsuhiro/work/zephyr-sdk/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gdb",
"miDebuggerServerAddress": "localhost:3333",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true,
},
],
},
]
}
上記のように変えます。デバッガのパス(miDebgguerPath)は適宜環境に合わせてください。
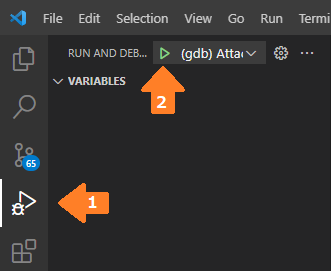
VSCodeのRun and Debugから先ほど作成した設定でデバッガを起動します。

デバッガが起動してOpenOCDに接続できるとVSCodeの上部に小さなツールバーが出てきます。出ない場合は下部にエラーメッセージが表示されるはず。
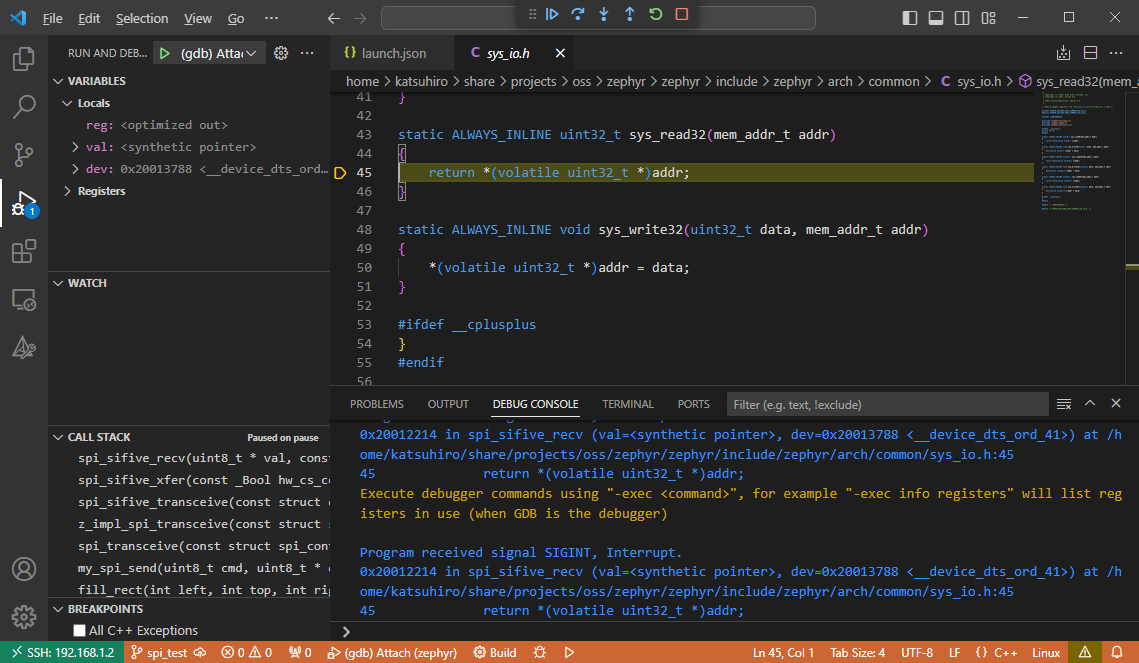
ツールバーのPauseボタン(左端)を押すと、HiFive1ボードの実行が停止して実行中のプログラムのソースコードが表示され、コールスタックの表示なども動作するはずです。ブレークポイントの設定や再開、ステップ実行などもできます。
私はCUIでもあまり困らないタイプですが、デバッガだけはGUIの方が見やすくて捗りますね。VSCodeのコード閲覧性が良いというのもありそうです。
できていない点
実質デバッガのアタッチしかできていません。ボードのリセット、実行ファイルのロードを端末から手動でやっている点が非常にイマイチです。
VSCodeのC/C++ Debugger Extensionは良く知らないので、VSCodeから実行する方法が判明したら追記しておきます。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年1月2日
羽田空港で大事故
早朝の便で東京に帰ってきました。
Twitterで羽田空港がどうこうと騒いでいる人がたくさんいて、何かあったのか?とニュースを見たら、羽田空港で日本航空機のエアバスA350と海上保安庁機のボンバルディアDHC8が滑走路上で衝突し、日航機が爆発炎上しているLive映像が流れていました。さっきまで居た羽田空港……だよな?炎上してる……。
A350は炎上してほぼ灰になったにも関わらず、400人もの乗客が全員脱出に成功して死者が一人も出なかったのは奇跡です。日本航空が日頃から安全を重視して取り組んでいる賜物だと思います。
それにしても2024年は1月1日から大災害、大事故が連続しており、何とも不安になるスタートですね……。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年1月1日
石川の大地震
鳥取4日目。2024年が明けました。今年もよろしくお願いいたします。
夕方、奥さんと外を散歩していたら風もないのに近所の家の窓がガタガタと10〜20秒?ほど揺れ続けました。何だ?と思う間に地震警報が発令され、能登半島で大地震があったことを知ったのでした。
地震の後のニュースでは(特にNHKの山内泉アナウンサーが顕著でした)逃げろ、高い場所に逃げろ、テレビなんか見てないで明るいうちに早く逃げろ!という切実な想いが伝わってきました。
ニュースは感情を煽らないのが通常です。しかし東日本大震災では避難を冷静に呼びかけたところ、津波の高さが想像できなかったのか避難が遅れて津波に巻き込まれて亡くなった人がたくさんいたそうです。
東日本大震災の悲しい教訓から、NHKは「今すぐ高いところに逃げること!」とやや感情的に呼びかけるようにした(「東日本大震災を思い出してください!」その時、ことばで命を守れるか。NHKアナウンサーたちの10年 - NHK)のだそうです。
NHKの取り組みは非常に良い取り組みだと思います。
コメント一覧
- コメントはありません。
この記事にコメントする
2023年12月31日
VSCodeでRISC-Vボードをデバッグその3 - Linuxマシン側の準備(Akaria BSP)
目次: Linux
前回はLinuxマシンだけを使って、OpenOCDとGDBでRISC-Vボードをデバッグする方法を紹介しました。
今回はそのおまけです。VSCodeのデバッグの話を見たい方はその4をご覧ください。
デバッグ対象: Akaria NS31 on Arty 7
デバッグ対象は何でも良いと書きました。その例として、別のソフトウェア、別のボードを使うパターン(Akaria BSP + NS31 on Arty 7)を紹介します。
- CPU回路データ: NSITEXEサイトへのリンクから取得できます。
- FPGAへの書き込み: Vivadoサイトへのリンクから取得できます。書き込むだけならVivado Labソリューションで十分です。
- ツールチェーン: GitHubへのリンクから取得できます。アーカイブへの直接リンクはこちら(riscv64-unknown-elf, Ubuntu 22用)です。
- ソースコード: GitHubへのリンクから取得できます。
FPGAへの書き込み方は以前の日記(2023年4月24日の日記参照)でご紹介しました。そちらをご覧ください。
ツールチェーンのインストールをします。ディレクトリはどこでも良いですが、ここでは~/workで作業しているものとします。
RISC-V用ツールチェーンのインストール
$ cd ~/work $ wget https://github.com/nsitexe/akaria-riscv-toolchain/releases/download/nsitexe-20231117/riscv64-unknown-elf_ubuntu22.tar.gz $ tar xf riscv64-unknown-elf_ubuntu22.tar.gz $ export PATH=~/work/riscv64-unknown-elf/bin:$PATH $ riscv64-unknown-elf-gdb --version GNU gdb (GDB) 13.0.50.20220805-git Copyright (C) 2022 Free Software Foundation, Inc. License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html> This is free software: you are free to change and redistribute it. There is NO WARRANTY, to the extent permitted by law.
次にAkaria BSPのビルドをします。
Akaria BSPのビルド
$ git clone https://github.com/nsitexe/akaria-bmetal
$ cd akaria-bmetal/
$ rm -r build
$ cmake -B build -G Ninja -DARCH=riscv \
-DCROSS_COMPILE=riscv64-unknown-elf- \
-DCC=gcc \
-DCMAKE_BUILD_TYPE=RelWithDebInfo \
-DCMAKE_INSTALL_PREFIX=test/sysroot/ \
-DDEFCONF=riscv_nsitexe_ns31_arty
CMake Warning (dev) at CMakeLists.txt:3 (project):
cmake_minimum_required() should be called prior to this top-level project()
call. Please see the cmake-commands(7) manual for usage documentation of
both commands.
This warning is for project developers. Use -Wno-dev to suppress it.
-- The C compiler identification is GNU 13.2.0
-- The CXX compiler identification is GNU 13.2.0
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working C compiler: /usr/lib/ccache/cc - skipped
-- Detecting C compile features
-- Detecting C compile features - done
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Check for working CXX compiler: /usr/lib/ccache/c++ - skipped
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- The ASM compiler identification is GNU
-- Found assembler: /usr/lib/ccache/cc
---- CC is 'gcc'
---- Compiler is 'riscv64-unknown-elf-gcc'
---- CCASM is 'gcc'
---- Assembler is 'riscv64-unknown-elf-gcc'
---- DEFCONF is 'riscv_nsitexe_ns31_arty'
---- CONF dir is '/home/katsuhiro/work/akaria-bmetal/config'
---- ARCH dir is '/home/katsuhiro/work/akaria-bmetal/arch/riscv'
---- SOC dir is '/home/katsuhiro/work/akaria-bmetal/arch/riscv/nsitexe_ns31'
---- BOARD dir is '/home/katsuhiro/work/akaria-bmetal/board/riscv/nsitexe_ns31_arty'
---- arch is riscv
---- march is 'rv32imafc_zicsr_zifencei'
---- mabi is 'ilp32f'
-- Found Doxygen: /usr/bin/doxygen (found version "1.9.4") found components: doxygen dot
-- Configuring done (0.3s)
-- Generating done (0.0s)
-- Build files have been written to: /home/katsuhiro/work/akaria-bmetal/build
$ ninja -C build install
ninja: Entering directory `build'
[46/47] Install the project...
-- Install configuration: "RelWithDebInfo"
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/bin/add_auxdata
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/lib/libbmetal_crt.a
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal/bmetal.h
-- Up-to-date: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal/generated
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal/generated/autoconf.h
-- Installing: /home/katsuhiro/work/akaria-bmetal/test/sysroot/include/bmetal/generated/linker_gen.ld
テストアプリをビルドします。
Akaria BSPテストアプリのビルド
$ cd ~/work/akaria-bmetal/test $ make USE_NEWLIB=y
ビルドできました。1つ目の端末にてOpenOCDを起動します。
OpenOCDの起動
$ sudo openocd -c 'bindto 0.0.0.0' -f tcl/interface/jlink.cfg -f ./openocd-ns31.cfg
JTAGインタフェース用の設定ファイルtcl/interface/jlink.cfgはその2(2023年12月30日の日記参照)にてご紹介しています。SEGGER J-Link以外のインタフェースをご利用の場合は適宜変更をお願いします。
NS31 on Arty 7用の設定ファイルopenocd-ns31.cfgは以前の日記(2023年4月7日の日記参照)にてご紹介しています。
2つ目の端末にてGDBを使ってロード&実行します。
GDBによるロード&実行
$ riscv64-unknown-elf-gdb hello (gdb) target remote :3333 (gdb) monitor reset halt (gdb) load (gdb) continue
UARTから出力されていることを確認します。
NS31 on Arty 7のUART出力
$ pyserial-miniterm /dev/ttyUSB1 9600 --raw --- Miniterm on /dev/ttyUSB1 9600,8,N,1 --- --- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- hello world! good bye world!
Zephyr + HiFive1のときとロード&実行方法は一緒です。最初はとっつきにくいかもしれませんが、OpenOCDとGDBの組み合わせであれば他のソフトウェア、他のボードでもほぼ一緒の使い勝手で便利です。
コメント一覧
- コメントはありません。
この記事にコメントする
2023年12月30日
VSCodeでRISC-Vボードをデバッグその2 - Linuxマシン側の準備(Zephyr RTOS)
目次: Linux
前回はVisual Studio Code(以降VSCode)とSSH Remote Extensionを使ってLinuxマシンに接続するところまでを設定しました。
今回はその続き……の前に準備としてLinuxマシンだけを使って、
- OpenOCDを起動
- GDBで実行ファイルをロード&実行
- GDBでCUIデバッグする方法
を紹介します。
デバッグ対象: SiFive HiFive1ボード
デバッグ対象は何でも良いですがそう言われても困ると思うのでZephyr RTOSとSiFive HiFive1 Rev Bボードを使用します。Zephyr RTOSの開発環境セットアップとビルドは以前の日記(2023年12月27日の日記参照)で紹介しています。
以前の日記ではQEMU向けにビルドしましたが、今回は実ボードSiFive HiFive1 Rev B向けにビルドします。といってもほぼ同じです。下記のようにします。
Zephyrのビルド(west版)
$ west build -p always -b hifive1_revb samples/hello_world/ $ west flash
これでボードに実行ファイルが書き込まれて実行開始されるはずですが、これじゃ何だかわからない、中身をもう少し知りたい、という方のためにCMakeとGDBを使った手順を紹介します。
Zephyrのビルド(CMake版)
$ rm -r build $ cmake -B build -G Ninja -DBOARD=hifive1_revb samples/hello_world $ ninja -C build $ ls build/zephyr CMakeFiles kernel zephyr.bin arch lib zephyr.dts boards libzephyr.a zephyr.dts.d cmake linker.cmd zephyr.dts.pre cmake_install.cmake linker.cmd.dep zephyr.elf ★これがGDBなどで使う実行ファイル drivers linker_zephyr_pre0.cmd zephyr.lst dts.cmake linker_zephyr_pre0.cmd.dep zephyr.map edt.pickle misc zephyr.stat include runners.yaml zephyr_final.map isrList.bin snippets_generated.cmake zephyr_pre0.elf isr_tables.c soc zephyr_pre0.map kconfig subsys
ビルドに成功するとbuild/zephyr/zephyr.elfという実行ファイル(ELF形式)が生成されるはずです。
OpenOCDを起動
SiFive HiFive1ボードとLinuxマシンを以下の図のように接続しているとします。
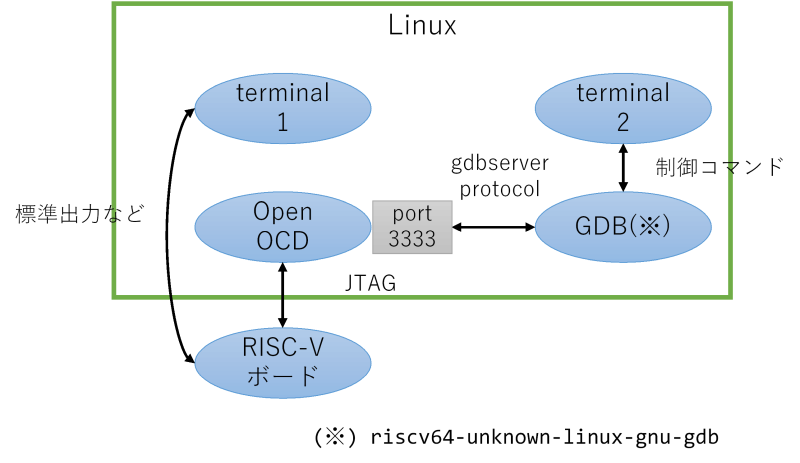
端末を2つ用意し、1つ目の端末でOpenOCDを起動します。システムにインストールされているOpenOCDのバージョンによっては動かないかもしれません。OpenOCDのビルドについては以前の日記(2023年6月28日の日記参照)で紹介しています。
OpenOCDの起動(Linux単独版)
$ sudo openocd -c 'bindto 0.0.0.0' -f tcl/interface/jlink.cfg -f tcl/board/sifive-hifive1-revb.cfg
Open On-Chip Debugger 0.12.0+dev-01422-g1b0b07baa-dirty (2023-11-30-05:58)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Warn : Interface already configured, ignoring
Info : J-Link OB-K22-SiFive compiled Nov 22 2019 12:57:38
Info : Hardware version: 1.00
Info : VTarget = 3.300 V
Info : clock speed 4000 kHz
Info : JTAG tap: riscv.cpu tap/device found: 0x20000913 (mfg: 0x489 (SiFive Inc)
, part: 0x0000, ver: 0x2)
Info : datacount=1 progbufsize=16
Info : Disabling abstract command reads from CSRs.
Info : Examined RISC-V core; found 1 harts
Info : hart 0: XLEN=32, misa=0x40101105
Info : starting gdb server for riscv.cpu.0 on 3333
Info : Listening on port 3333 for gdb connections
Info : Found flash device 'issi is25lp032' (ID 0x0016609d)
Ready for Remote Connections
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
OpenOCDに指定しているtcl/interface/xxxx.cfgというファイルは、OpenOCDのソースコードに含まれています。GitでOpenOCDのソースコードを丸ごと持ってくるか、
OpenOCDのソースコードリポジトリ取得
$ git clone https://git.code.sf.net/p/openocd/code openocd-code
コードを眺めるだけならGitHubのミラー(GitHubへのリンク)が見やすいです。
- jlink.cfg(GitHubへのリンク)
- sifive-hifive1-revb.cfg(GitHubへのリンク)
必要なファイルだけ見たい人は上記のリンクからどうぞ。
GDBで実行ファイルをロード&実行
次に2つ目の端末にてGDBを起動します。Zephyr SDKへのパスを通すのをお忘れなく。パスの通し方は(2023年12月27日の日記参照)の「Zephyr開発環境への入り方」を参照してください。
GDBの起動(Linux単独版)
$ riscv64-zephyr-elf-gdb build/zephyr/zephyr.elf (略) For help, type "help". Type "apropos word" to search for commands related to "word"... Reading symbols from build/zephyr/zephyr.elf... (gdb) target remote :3333 (gdb) monitor reset halt (gdb) load Loading section rom_start, size 0x18 lma 0x20010000 Loading section reset, size 0x6 lma 0x20010018 Loading section exceptions, size 0x146 lma 0x20010020 Loading section text, size 0x35a2 lma 0x20010168 Loading section initlevel, size 0x40 lma 0x2001370c Loading section device_area, size 0x50 lma 0x2001374c Loading section sw_isr_table, size 0x200 lma 0x2001379c Loading section log_const_area, size 0x20 lma 0x2001399c Loading section rodata, size 0x460 lma 0x200139bc Loading section datas, size 0xdc lma 0x20013e1c Loading section device_states, size 0x8 lma 0x20013ef8 Loading section .last_section, size 0x4 lma 0x20013f00 Start address 0x20010000, load size 16126 Transfer rate: 595 bytes/sec, 1343 bytes/write. (gdb) continue
HiFive1のUARTからZephyrというかHello worldアプリのメッセージが出ていることを確認しましょう。
HiFive1のUART確認
$ pyserial-miniterm /dev/ttyACM0 115200 --- Miniterm on /dev/ttyACM0 115200,8,N,1 --- --- Quit: Ctrl+] | Menu: Ctrl+T | Help: Ctrl+T followed by Ctrl+H --- *** Booting Zephyr OS build zephyr-v3.4.0-1149-g2bf091f8af5b *** Hello World! hifive1_revb
HiFive1は動作が遅いためかOpenOCD側に下記のような警告が何度か出ます。
OpenOCDの警告
JTAG tap: riscv.cpu tap/device found: 0x20000913 (mfg: 0x489 (SiFive Inc), part: 0x0000, ver: 0x2) keep_alive() was not invoked in the 1000 ms timelimit. GDB alive packet not sent! (1497 ms). Workaround: increase "set remotetimeout" in GDB
動作に支障はないですが、警告に書いてあるworkaroundの通りset remotetimeout unlimitedとしても警告が出続けるのは若干気になりますね……。
GDBでCUIデバッグする方法
普通のLinuxアプリケーションをデバッグするときと同じように使えます。
GDB CUIによるデバッグ
(gdb) monitor reset halt
(gdb) d
Delete all breakpoints? (y or n) y
(gdb) hb main
Hardware assisted breakpoint 1 at 0x20010970: file zephyr/zephyr/samples/hello_world/src/main.c, line 11.
(gdb) c
Continuing.
Breakpoint 1, main () at zephyr/zephyr/samples/hello_world/src/main.c:11
11 printk("Hello World! %s\n", CONFIG_BOARD);
HiFive1はRAMが非常に少ないためXIP(Execution In Place)つまりフラッシュROM上のプログラムを直接実行します。そのためブレークポイントは自動的にハードウェア支援ブレークポイント(hbで使えるものと一緒)になります。ハードウェア支援ブレークポイントは設定可能な数に上限があるため、通常のブレークポイントと挙動が異なったり、エラーになったりすることがあります。
あと全体的に非常に遅いです。stepやnextを実行するとしばらく反応が返ってきません。例として使うには良くなかったかな……。
おまけ、リモートデバッグ
これだけだとwestの焼き直しで面白くないので、おまけとして遠隔地にあるボードを扱う方法をご紹介します。
繰り返しになりますがOpenOCDのビルドについては以前の日記(2023年6月28日の日記参照)で紹介しています。Raspberry Pi用のOpenOCDをビルドするときにご参照ください。
SiFive HiFive1ボードとRaspberry PiとLinuxマシンを以下の図のように接続しているとします。Linuxマシンもしくは、HiFive1ボードとRaspberry Piのペアがお互いに離れている状況を考えてもらうとわかりやすいかと思います。
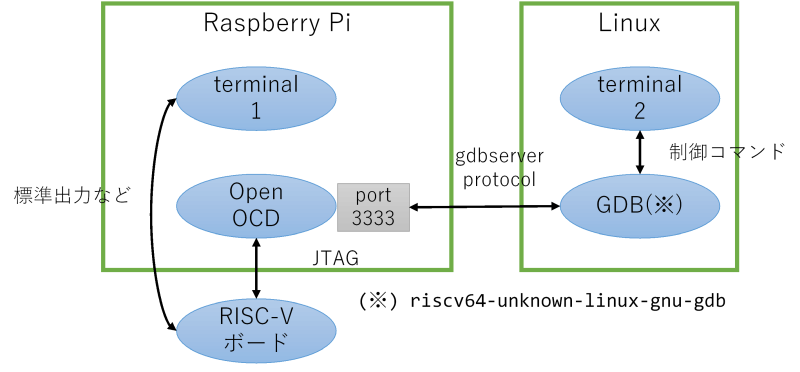
例えばLinuxマシンを2階におき、Raspberry PiとHiFive1ボード(とLinuxマシンを操作するノートPCとか)を1階の机に置く、といったデバッグ環境が作れます。家と会社などでもアリです。
やることは基本的に同じです。Raspberry Pi側で1つ目の端末を起動し、OpenOCDを起動します。起動するコマンドも同じです。
OpenOCDの起動(LinuxとRasPiコンビ版)
#### Raspberry Pi側の端末
$ sudo openocd -c 'bindto 0.0.0.0' -f tcl/interface/jlink.cfg -f tcl/board/sifive-hifive1-revb.cfg
Open On-Chip Debugger 0.12.0+dev-01422-g1b0b07baa-dirty (2023-11-30-05:58)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Warn : Interface already configured, ignoring
Info : J-Link OB-K22-SiFive compiled Nov 22 2019 12:57:38
Info : Hardware version: 1.00
Info : VTarget = 3.300 V
Info : clock speed 4000 kHz
Info : JTAG tap: riscv.cpu tap/device found: 0x20000913 (mfg: 0x489 (SiFive Inc)
, part: 0x0000, ver: 0x2)
Info : datacount=1 progbufsize=16
Info : Disabling abstract command reads from CSRs.
Info : Examined RISC-V core; found 1 harts
Info : hart 0: XLEN=32, misa=0x40101105
Info : starting gdb server for riscv.cpu.0 on 3333
Info : Listening on port 3333 for gdb connections
Info : Found flash device 'issi is25lp032' (ID 0x0016609d)
Ready for Remote Connections
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
次にLinux側で2つ目の端末を起動し、GDBを起動します。異なるのはremote targetコマンドの部分のみです。Raspberry PiのIPアドレスが192.168.1.10だとします。
GDBの起動(LinuxとRasPiコンビ版)
#### Linuxマシン側の端末 $ riscv64-zephyr-elf-gdb build/zephyr/zephyr.elf (略) For help, type "help". Type "apropos word" to search for commands related to "word"... Reading symbols from build/zephyr/zephyr.elf... (gdb) target remote 192.168.1.10:3333 (gdb) monitor reset halt (gdb) load Loading section rom_start, size 0x18 lma 0x20010000 Loading section reset, size 0x6 lma 0x20010018 Loading section exceptions, size 0x146 lma 0x20010020 Loading section text, size 0x35a2 lma 0x20010168 Loading section initlevel, size 0x40 lma 0x2001370c Loading section device_area, size 0x50 lma 0x2001374c Loading section sw_isr_table, size 0x200 lma 0x2001379c Loading section log_const_area, size 0x20 lma 0x2001399c Loading section rodata, size 0x460 lma 0x200139bc Loading section datas, size 0xdc lma 0x20013e1c Loading section device_states, size 0x8 lma 0x20013ef8 Loading section .last_section, size 0x4 lma 0x20013f00 Start address 0x20010000, load size 16126 Transfer rate: 595 bytes/sec, 1343 bytes/write. (gdb) continue
GDBとOpenOCD間がTCP/IPで通信しているからできる技ですね。使ってみるとわかる便利さです。
コメント一覧
- コメントはありません。
この記事にコメントする
2023年12月29日
VSCodeでRISC-Vボードをデバッグその1 - SSH Remote Extensionの設定
目次: Linux
Visual Studio Code(以降VSCode)のSSH Remote Extensionを使って、LinuxマシンのGDBを起動、OpenOCDに接続、RISC-Vボードをデバッグする方法をメモしておきます。
以前紹介した方法(2021年3月3日の日記参照)と似ていますがWindows用のGDBバイナリをビルドする必要がないという利点があります。
今回はSSH Remote Extensionのインストールと設定です。
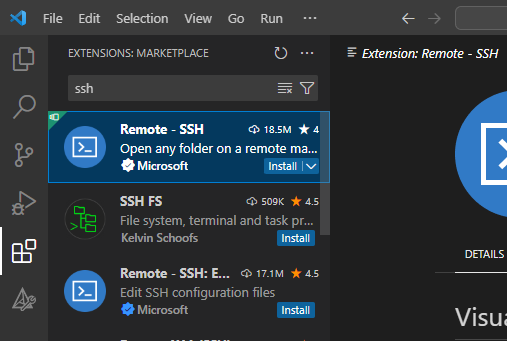
最初にExtensionsからSSH Remoteをインストールします。
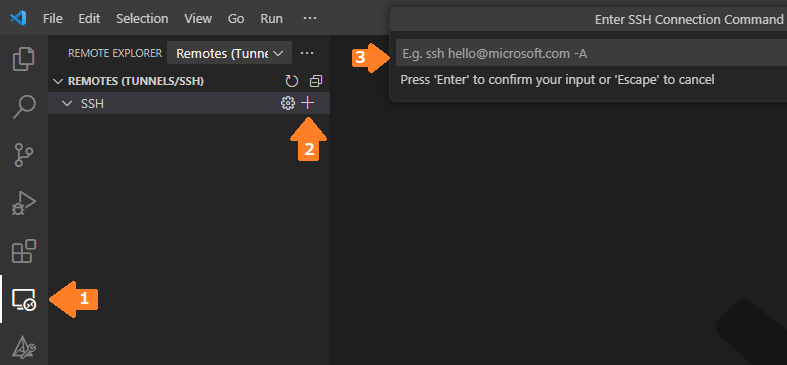
REMOTE EXPLORER(矢印1)からNew Remoteを選択して(矢印2)GDBがインストールされているLinuxマシンを指定します(矢印3)。指定方法は例にある通りusername@hostnameです。
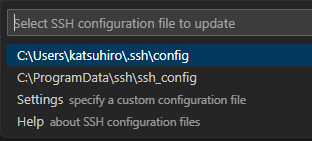
SSHの接続先設定を保存するファイル名を指定します。私は特にこだわりがないので、デフォルトのC:\Users\(ユーザー名)\.ssh\configを使いました。
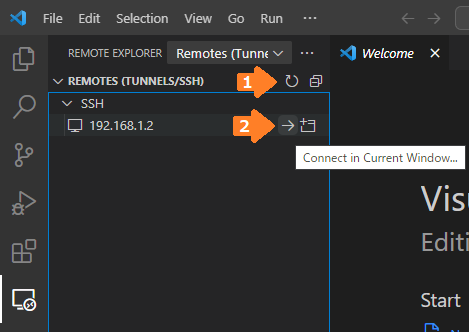
SSHの設定を追加したら、REMOTES (TUNNELS/SSH)のRefreshを押します(矢印1)。追加した設定が表示されたらConnect in Current Windowを押します(矢印2)。
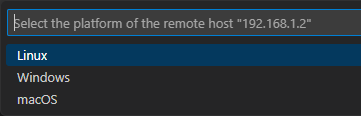
接続先のマシンはLinuxか?Windowsか?macOSか?と聞かれます。今回はLinuxを使っているのでLinuxを選択します。
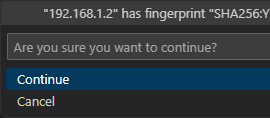
接続しようとしているホストのfingerprintが表示され、本当に接続するか?と質問されます。初めて接続するホストの場合は必ず聞かれます。continueを押してください。
もしこの質問が2回目以降の接続で表示される場合は、異なるホストが同じIPアドレスを使用しているなど何らかの異常が発生している可能性があります。迂闊にcontinueを押さず、本当に接続して良いか確認してください。
パスワードを入力してください。
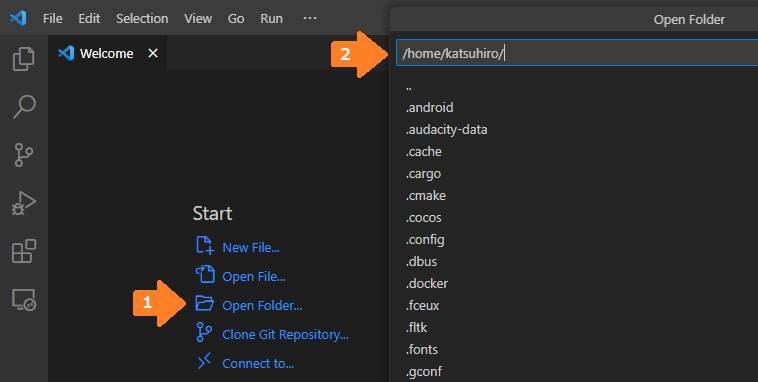
接続に成功するとWelcome画面が表示されるはずなので、Open Folder(矢印1)を押して、デバッグしたいソースコードがあるディレクトリのパスを指定(矢印2)します。
続きはまた今度。
コメント一覧
- コメントはありません。
この記事にコメントする
2023年12月28日
帰省
今年は奥さんの実家である鳥取に帰省しました。
夫婦お互いの実家が近ければそれぞれ3日ずつ滞在などできますが、我が家の場合は結構遠い(奥さんは鳥取、私は北海道)のです……。仕方ないので帰省のルールとして、
- 正月、GW、お盆の年3回帰省する
- 夫婦一緒に帰省する
- 行き先は毎回変える(GW: 鳥取、お盆: 北海道、正月: 鳥取、GW: 北海道、、、のように)
というルールで運用していました。なので鳥取での年越しは2年に1回となりますが、近年はCOVID-19騒ぎで帰れなかったり、自分達もCOVIDに感染したりでルール運用が乱れ、鳥取での年越しのチャンスがありませんでした。
たぶん2019年末以来じゃないかな?つまり4年ぶり?
コメント一覧
- コメントはありません。
この記事にコメントする
2023年12月27日
Hello! Zephyr OS!!(2023年版)
目次: Zephyr
Zephyr RTOSのインストール、ビルドの手順が少し変わったので改めて紹介したいと思います。
基本的にはZephyrのGetting Startedに記載の通りですが、実行する上での補足や引っかかるところを説明したいと思います。
Zephyr開発環境のセットアップ
以降、作業するディレクトリは~/workとします。
ZephyrのGetting Startedを順に実行します。既存のPython環境を壊さないようにInstall within virtual environmentの手順を使うことをお勧めします。
依存ツールインストールとPython venv環境の作成
# apt-get install git cmake ninja-build gperf \
ccache dfu-util device-tree-compiler wget \
python3-dev python3-pip python3-setuptools python3-tk python3-wheel xz-utils file \
make gcc gcc-multilib g++-multilib libsdl2-dev libmagic1
# apt-get install python3-venv
$ cd ~/work/zephyr-sdk-0.16.4/
$ python3 -m venv _venv
$ source ~/work/zephyr-sdk-0.16.4/_venv/bin/activate
Python venvを有効にするとシェルのプロンプトの頭に(_venv)のような環境名が付くようになります。venv用のディレクトリはどこに作成しても良いです。私はZephyr SDKの下に作ることが多いです。作成済みのvenvを再度使うときはsource ~/work/zephyr-sdk-0.16.4/_venv/bin/activateを実行します。
続きを実行しましょう。westを使ってZephyrと周辺ツール群をダウンロードします。
Zephyrと周辺ツール群をダウンロード
$ pip install west $ cd ~/work $ west init zephyr === Initializing in /home/katsuhiro/work/zephyr --- Cloning manifest repository from https://github.com/zephyrproject-rtos/zephyr Cloning into '/home/katsuhiro/work/zephyr/.west/manifest-tmp'... remote: Enumerating objects: 968377, done. remote: Counting objects: 100% (17/17), done. remote: Compressing objects: 100% (13/13), done. remote: Total 968377 (delta 8), reused 8 (delta 4), pack-reused 968360 Receiving objects: 100% (968377/968377), 600.07 MiB | 20.80 MiB/s, done. Resolving deltas: 100% (733897/733897), done. Updating files: 100% (31355/31355), done. --- setting manifest.path to zephyr === Initialized. Now run "west update" inside /home/katsuhiro/work/zephyr. $ cd ~/work/zephyr $ west update (大量にリポジトリがクローンされますのでしばし待ちます) $ west zephyr-export Zephyr (/home/katsuhiro/work/zephyr/zephyr/share/zephyr-package/cmake) has been added to the user package registry in: ~/.cmake/packages/Zephyr ZephyrUnittest (/home/katsuhiro/work/zephyr/zephyr/share/zephyrunittest-package/cmake) has been added to the user package registry in: ~/.cmake/packages/ZephyrUnittest $ pip install -r ~/work/zephyr/zephyr/scripts/requirements.txt (大量にモジュールがインストールされますのでしばし待ちます)
基本的にはコマンドを実行して待つだけです。たぶん。
SDKをインストールします。アーカイブはGitHubのreleaseページから取得できます。特にこだわりがなければ、現状の最新版である0.16.4を使ってください。
アーカイブがたくさんあって迷うと思いますが、今回はサイズが小さくてインストールするツールチェーンを選択できるzephyr-sdk-0.16.4_linux-x86_64_minimal.tar.xzを使います。
Zephyr SDKのインストール
$ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.4/zephyr-sdk-0.16.4_linux-x86_64_minimal.tar.xz $ tar xf zephyr-sdk-0.16.4_linux-x86_64_minimal.tar.xz $ cd ~/work/zephyr-sdk-0.16.4/ $ ./setup.sh -c -t riscv64-zephyr-elf Zephyr SDK 0.16.4 Setup Installing 'riscv64-zephyr-elf' toolchain ... toolchain_linux-x86 100%[===================>] 105.07M 24.7MB/s 時間 4.3s All done.
何も引数を付けずにすべてインストールしても良いです(が、結構時間が掛かります)。今回はRISC-V向けのツールチェーンがあれば良いので-t riscv64-zephyr-elfを付けることで時間短縮しました。注意点としては-cオプションを忘れないようにしてください。Zephyrビルド時にエラーが発生します。
次にhosttoolsをインストールします。要らない場合もありますが、今回はQEMUを使って動作確認したいのでインストールしましょう。
hosttoolsのインストール
$ ./zephyr-sdk-x86_64-hosttools-standalone-0.9.sh Zephyr Yocto Toolchain SDK installer version 0.9 ================================================ Enter target directory for SDK (default: /opt/zephyr-sdk/0.9): /home/katsuhiro/work/zephyr-sdk-0.16.4/host You are about to install the SDK to "/home/katsuhiro/work/zephyr-sdk-0.16.4/host". Proceed [Y/n]? y Extracting SDK..................done Setting it up...done SDK has been successfully set up and is ready to be used. Each time you wish to use the SDK in a new shell session, you need to source the environment setup script e.g. $ . /home/katsuhiro/work/zephyr-sdk-0.16.4/host/environment-setup-x86_64-pokysdk-linux
上記の作業を全て終えた後のディレクトリ構造はこんな感じです。
Zephyr開発環境のディレクトリ構成
$ tree -L 2 ~/work /home/katsuhiro/work |-- zephyr | |-- bootloader | |-- modules | |-- tools | `-- zephyr ★Zephyr RTOSのコード |-- zephyr-sdk-0.16.4 | |-- _venv | |-- cmake | |-- host ★hosttools | |-- riscv64-zephyr-elf ★RISC-V用ツールチェーン | |-- sdk_toolchains | |-- sdk_version | |-- setup.sh | `-- zephyr-sdk-x86_64-hosttools-standalone-0.9.sh `-- zephyr-sdk-0.16.4_linux-x86_64_minimal.tar.xz
Zephyr開発環境はセットアップ手順は短くなったとは思うんですけど、中身は複雑になってトラブルが起きたときの解決が困難になった印象です。昔より依存するツールが増えているのかな……?
Zephyr開発環境への入り方
使用したいツールに応じて環境を有効化すると良いです。
Zephyr開発環境への入り方の例
#### Python venv環境を有効化 $ source ~/work/zephyr-sdk-0.16.4/_venv/bin/activate #### QEMUなどhosttoolsを使う場合、hosttoolsを有効化 $ source ~/work/zephyr-sdk-0.16.4/host/environment-setup-x86_64-pokysdk-linux #### デバッガなどを直接実行するならばツールチェーンにパスを通す $ export PATH=~/work/zephyr-sdk-0.16.4/riscv64-zephyr-elf/bin:$PATH
私はいちいち選ぶのが面倒なので、全部有効にしております。
Zephyrのビルドと実行
Zephyr開発環境が正常にセットアップできたかどうか確かめるため、QEMU向けにビルドしましょう。
Zephyrのビルド(west版)
$ cd ~/work/zephyr/zephyr $ west build -p always -b qemu_riscv64 samples/hello_world/ (ログは省略)
ビルドできたので実行したいところですが、なぜかwestを使ってQEMUで実行する方法が見当たりません。仕方ないのでcmakeでビルド&実行します。こちらのやり方も覚えておいて損はないでしょう……。
Zephyrのビルド(cmake版)
$ cd ~/work/zephyr/zephyr
$ rm -r build
$ cmake -B build -G Ninja -DBOARD=qemu_riscv64 samples/hello_world
Loading Zephyr default modules (Zephyr repository).
-- Application: /home/katsuhiro/work/zephyr/zephyr/samples/hello_world
-- CMake version: 3.22.1
-- Found Python3: /home/katsuhiro/work/zephyr-sdk-0.16.4/_venv/bin/python (found suitable version "3.10.12", minimum required is "3.8") found components: Interpreter
-- Cache files will be written to: /home/katsuhiro/.cache/zephyr
-- Zephyr version: 3.5.99 (/home/katsuhiro/work/zephyr/zephyr)
-- Found west (found suitable version "1.2.0", minimum required is "0.14.0")
-- Board: qemu_riscv64
-- ZEPHYR_TOOLCHAIN_VARIANT not set, trying to locate Zephyr SDK
-- Found host-tools: zephyr 0.16.4 (/home/katsuhiro/work/zephyr-sdk-0.16.4)
-- Found toolchain: zephyr 0.16.4 (/home/katsuhiro/work/zephyr-sdk-0.16.4)
-- Found Dtc: /home/katsuhiro/work/zephyr-sdk-0.16.4/host/sysroots/x86_64-pokysdk-linux/usr/bin/dtc (found suitable version "1.6.0", minimum required is "1.4.6")
-- Found BOARD.dts: /home/katsuhiro/work/zephyr/zephyr/boards/riscv/qemu_riscv64/qemu_riscv64.dts
-- Generated zephyr.dts: /home/katsuhiro/work/zephyr/zephyr/build/zephyr/zephyr.dts
-- Generated devicetree_generated.h: /home/katsuhiro/work/zephyr/zephyr/build/zephyr/include/generated/devicetree_generated.h
-- Including generated dts.cmake file: /home/katsuhiro/work/zephyr/zephyr/build/zephyr/dts.cmake
Parsing /home/katsuhiro/work/zephyr/zephyr/Kconfig
Loaded configuration '/home/katsuhiro/work/zephyr/zephyr/boards/riscv/qemu_riscv64/qemu_riscv64_defconfig'
Merged configuration '/home/katsuhiro/work/zephyr/zephyr/samples/hello_world/prj.conf'
Configuration saved to '/home/katsuhiro/work/zephyr/zephyr/build/zephyr/.config'
Kconfig header saved to '/home/katsuhiro/work/zephyr/zephyr/build/zephyr/include/generated/autoconf.h'
-- Found GnuLd: /home/katsuhiro/work/zephyr-sdk-0.16.4/riscv64-zephyr-elf/bin/../lib/gcc/riscv64-zephyr-elf/12.2.0/../../../../riscv64-zephyr-elf/bin/ld.bfd (found version "2.38")
-- The C compiler identification is GNU 12.2.0
-- The CXX compiler identification is GNU 12.2.0
-- The ASM compiler identification is GNU
-- Found assembler: /home/katsuhiro/work/zephyr-sdk-0.16.4/riscv64-zephyr-elf/bin/riscv64-zephyr-elf-gcc
-- Using ccache: /usr/bin/ccache
-- Configuring done
-- Generating done
-- Build files have been written to: /home/katsuhiro/work/zephyr/zephyr/build
$ ninja -C build
ninja: Entering directory `build'
[1/99] Preparing syscall dependency handling
[2/99] Generating include/generated/version.h
-- Zephyr version: 3.5.99 (/home/katsuhiro/work/zephyr/zephyr), build: zephyr-v3.5.0-3603-g603c3af895b0
[98/99] Linking C executable zephyr/zephyr.elf
Memory region Used Size Region Size %age Used
RAM: 36140 B 256 MB 0.01%
IDT_LIST: 0 GB 2 KB 0.00%
Generating files from /home/katsuhiro/work/zephyr/zephyr/build/zephyr/zephyr.elf for board: qemu_riscv64
[99/99] cd /home/katsuhiro/work/zephyr.../zephyr/zephyr/build/zephyr/zephyr.elf
$ ninja -C build run
ninja: Entering directory `build'
[0/1] To exit from QEMU enter: 'CTRL+a, x'[QEMU] CPU: riscv64
*** Booting Zephyr OS build zephyr-v3.5.0-3603-g603c3af895b0 ***
Hello World! qemu_riscv64
実行できました。もしエラーが出る場合は次のトラブルシューティングもご参照ください。
トラブルシューティング
Zephyr SDKセットアップ時に-cオプションを付けない = Zephyr SDK cmake packageのインストールを忘れていると、Zephyrのビルド時に長々とエラーが出て怒られます。
Zephyr SDK cmake packageをインストールしていないと発生するエラー
CMake Error at /home/katsuhiro/work/zephyr/zephyr/cmake/modules/FindZephyr-sdk.c
make:109 (find_package):
Could not find a package configuration file provided by "Zephyr-sdk"
(requested version 0.16) with any of the following names:
Zephyr-sdkConfig.cmake
zephyr-sdk-config.cmake
Add the installation prefix of "Zephyr-sdk" to CMAKE_PREFIX_PATH or set
"Zephyr-sdk_DIR" to a directory containing one of the above files. If
"Zephyr-sdk" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
/home/katsuhiro/work/zephyr/zephyr/cmake/modules/FindHostTools.cmake:53 (find_package)
/home/katsuhiro/work/zephyr/zephyr/cmake/modules/dts.cmake:9 (find_package)
/home/katsuhiro/work/zephyr/zephyr/cmake/modules/zephyr_default.cmake:129 (include)
/home/katsuhiro/work/zephyr/zephyr/share/zephyr-package/cmake/ZephyrConfig.cmake:66 (include)
/home/katsuhiro/work/zephyr/zephyr/share/zephyr-package/cmake/ZephyrConfig.cmake:92 (include_boilerplate)
CMakeLists.txt:5 (find_package)
Zephyr SDKのセットアップは2回実行しても問題ないので-cオプションを付けてやり直しましょう。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2024 | > | ||||
| << | < | 01 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | 1 | 2 | 3 | 4 | 5 | 6 |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 | - | - | - |
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
