2023年4月28日
Linuxの/dev/zeroの実装
目次: Linux
Twitterで/dev/zeroの話をしている人が居て、そういえばLinuxはどこで実装しているのかうろ覚えだったので、コードを調べつつメモしておきます。
デバイスメジャー番号の調べ方
デバイスファイル/dev/zeroをls -lで見ると、キャラクターデバイスであること、メジャー番号1、マイナー番号5だと分かります。
/dev/zeroをlsで調べた結果
$ LANG=C ls -la /dev/zero crw-rw-rw- 1 root root 1, 5 Mar 27 23:22 /dev/zero ↑ ↑ ↑ デバイスメジャー番号1、マイナー番号5 c: キャラクターデバイス
Linuxの場合/proc/devicesにデバイスメジャー番号の一覧があります。
/proc/devicesの中身
$ head /proc/devices Character devices: 1 mem ★★キャラクターデバイス、メジャー番号1 = memドライバ★★ 4 /dev/vc/0 4 tty 4 ttyS 5 /dev/tty 5 /dev/console 5 /dev/ptmx 7 vcs 10 misc
メジャー番号1を使用しているmemというドライバを調べれば良いことが分かりました。
ドライバの実装箇所
大抵はドライバ名でgrepすると発見できますが、memという単語はいたるところに使われていて探しにくいと思います。幸いながらmemはメジャー番号が常に1に固定されたドライバなので、メジャー番号を頼りに探した方が良いでしょう。
メジャー番号1を使用するドライバ
// linux/include/uapi/linux/major.h
#define MEM_MAJOR 1
// linux/drivers/char/mem.c
static int __init chr_dev_init(void)
{
int minor;
if (register_chrdev(MEM_MAJOR, "mem", &memory_fops)) //★★キャラクターデバイス、メジャー番号1 = memとして登録★★
printk("unable to get major %d for memory devs\n", MEM_MAJOR);
メジャー番号の謎は解けて、実装箇所がdrivers/char/mem.cであることがわかりました。
マイナー番号の役割
次に気になるのは/dev/zeroも/dev/nullも同じメジャー番号1ですが、どう区別するか?です。メジャー番号は同じでも、マイナー番号は異なっていて/dev/zero = 5, /dev/null = 3です。マイナー番号をどこで見ているか、何に使っているか調べます。
open関数とマイナー番号
// linux/drivers/char/mem.c
static const struct file_operations memory_fops = {
.open = memory_open, //★★メジャー番号1のキャラクタデバイスファイルを開く時に呼ばれる関数★★
.llseek = noop_llseek,
};
static int memory_open(struct inode *inode, struct file *filp)
{
int minor;
const struct memdev *dev;
minor = iminor(inode);
if (minor >= ARRAY_SIZE(devlist))
return -ENXIO;
dev = &devlist[minor]; //★★デバイスマイナー番号をみて操作を決める★★
if (!dev->fops)
return -ENXIO;
filp->f_op = dev->fops;
filp->f_mode |= dev->fmode;
if (dev->fops->open)
return dev->fops->open(inode, filp);
return 0;
}
マイナー番号からdevlistの何番目の要素を使うか決めているようです。devlistは何かというと、
memドライバのdevlist変数の定義
// linux/drivers/char/mem.c
static const struct memdev {
const char *name;
umode_t mode;
const struct file_operations *fops;
fmode_t fmode;
} devlist[] = {
#ifdef CONFIG_DEVMEM
[DEVMEM_MINOR] = { "mem", 0, &mem_fops, FMODE_UNSIGNED_OFFSET },
#endif
[3] = { "null", 0666, &null_fops, FMODE_NOWAIT },
#ifdef CONFIG_DEVPORT
[4] = { "port", 0, &port_fops, 0 },
#endif
[5] = { "zero", 0666, &zero_fops, FMODE_NOWAIT }, //★★minor 5 = /dev/zero★★
[7] = { "full", 0666, &full_fops, 0 },
[8] = { "random", 0666, &random_fops, FMODE_NOWAIT },
[9] = { "urandom", 0666, &urandom_fops, FMODE_NOWAIT },
#ifdef CONFIG_PRINTK
[11] = { "kmsg", 0644, &kmsg_fops, 0 },
#endif
};
...
static const struct file_operations zero_fops = {
.llseek = zero_lseek,
.write = write_zero,
.read_iter = read_iter_zero,
.read = read_zero, //★★read関数★★
.write_iter = write_iter_zero,
.mmap = mmap_zero,
.get_unmapped_area = get_unmapped_area_zero,
#ifndef CONFIG_MMU
.mmap_capabilities = zero_mmap_capabilities,
#endif
マイナー番号をインデックスとした様々なデバイスを定義しています。今回はインデックス5, "zero" (= /dev/zero) をさらに追います。
/dev/zeroの正体
ゼロを返すとはすなわち、読み出す(= readを呼ぶ)とバッファの中身にゼロが書かれて戻ってくることを意味します。/dev/zeroのread関数であるread_zero() を見ると、
/dev/zeroのread関数
// linux/drivers/char/mem.c
static ssize_t read_zero(struct file *file, char __user *buf,
size_t count, loff_t *ppos)
{
size_t cleared = 0;
while (count) {
size_t chunk = min_t(size_t, count, PAGE_SIZE);
size_t left;
left = clear_user(buf + cleared, chunk); //★★バッファにゼロを書いている★★
if (unlikely(left)) {
cleared += (chunk - left);
if (!cleared)
return -EFAULT;
break;
}
cleared += chunk;
count -= chunk;
if (signal_pending(current))
break;
cond_resched();
}
return cleared;
}
バッファをゼロクリアしているのはclear_user() という関数のようです。この関数はアーキテクチャによって処理が異なります。一例としてRISC-Vの実装を見ましょう。
clear_user() 関数RISC-V向けの実装
// linux/arch/riscv/include/asm/uaccess.h
static inline
unsigned long __must_check clear_user(void __user *to, unsigned long n)
{
might_fault();
return access_ok(to, n) ?
__clear_user(to, n) : n;
}
// linux/arch/riscv/lib/uaccess.S
.macro fixup op reg addr lbl
100:
\op \reg, \addr
_asm_extable 100b, \lbl
.endm
ENTRY(__clear_user)
/* Enable access to user memory */
li t6, SR_SUM
csrs CSR_STATUS, t6 //★SUM (permit Supervisor User Memory access) をセットしている★
//★詳細はriscv-privilegedの3.1.6.3 Memory Privilege in mstatus Registerを参照★
add a3, a0, a1
addi t0, a0, SZREG-1
andi t1, a3, ~(SZREG-1)
andi t0, t0, ~(SZREG-1)
/*
* a3: terminal address of target region
* t0: lowest doubleword-aligned address in target region
* t1: highest doubleword-aligned address in target region
*/
bgeu t0, t1, 2f
bltu a0, t0, 4f
1:
fixup REG_S, zero, (a0), 11f //★★メインのループ処理★★
addi a0, a0, SZREG
bltu a0, t1, 1b
2:
bltu a0, a3, 5f
3:
/* Disable access to user memory */
csrc CSR_STATUS, t6
li a0, 0
ret
4: /* Edge case: unalignment */
fixup sb, zero, (a0), 11f
addi a0, a0, 1
bltu a0, t0, 4b
j 1b
5: /* Edge case: remainder */
fixup sb, zero, (a0), 11f
addi a0, a0, 1
bltu a0, a3, 5b
j 3b
/* Exception fixup code */
11:
/* Disable access to user memory */
csrc CSR_STATUS, t6
mv a0, a1
ret
ENDPROC(__clear_user)
EXPORT_SYMBOL(__clear_user)
// linux/arch/riscv/include/asm/asm.h
#define REG_S __REG_SEL(sd, sw) //★64bitならsd, 32bitならsw★
//★アセンブラの場合aがそのまま出力、Cの場合は文字列として出力★
// asm: __ASM_STR(abc) -> aaa
// C: __ASM_STR(abc) -> "aaa"
#if __riscv_xlen == 64
#define __REG_SEL(a, b) __ASM_STR(a)
#elif __riscv_xlen == 32
#define __REG_SEL(a, b) __ASM_STR(b)
#else
#error "Unexpected __riscv_xlen"
#endif
#ifdef __ASSEMBLY__
#define __ASM_STR(x) x //★アセンブラなのでこちら★
#else
#define __ASM_STR(x) #x
#endif
アセンブラが出てきて面喰らいますが、基本的にはバッファにゼロをストアする処理です。memset() と大きく異なる点はmstatus.SUMをセットしていることです。RISC-VではSUMをセットしないとS-mode (Supervisor mode) からU-mode (User mode) のメモリにストアできない(ストアアクセスフォルトが発生)ためです。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2023年4月24日
Arty A7のFPGAを書き換える方法
目次: RISC-V
いつもArty A7-100を書き換えるときSPI Flashの型番を忘れるので、手順と一緒にメモしておきます。
もしLinuxを使っている場合は、Vivadoをインストールしたディレクトリの下にudev用ルールがありますので、/etc/udev/rules.d/にコピーします。
udevルールがおいてある場所
$ cp \ Vivado/2023.2/data/xicom/cable_drivers/lin64/install_script/install_drivers/52-xilinx-ftdi-usb.rules \ Vivado/2023.2/data/xicom/cable_drivers/lin64/install_script/install_drivers/52-xilinx-pcusb.rules \ Vivado/2023.2/data/xicom/cable_drivers/lin64/install_script/install_drivers/52-xilinx-digilent-usb.rules \ /etc/udev/rules.d/ # コピーした後はリロード $ sudo udevadm control -R
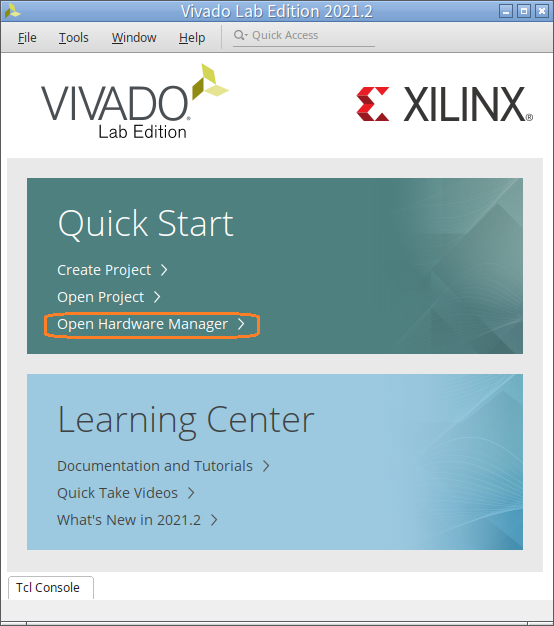
Arty A7にはXilinx Artix-7 (XC7A100TCSG324-1) というFPGAが搭載されています。XilinxのFPGAを扱うにはVivadoというツールが必要で、このツールを使うためには有料ライセンスが必要です。が、FPGAに回路を書き込むだけなら無料で使用可能なLab Editionが使えます。起動したらOpen Hardware Managerを選択します。
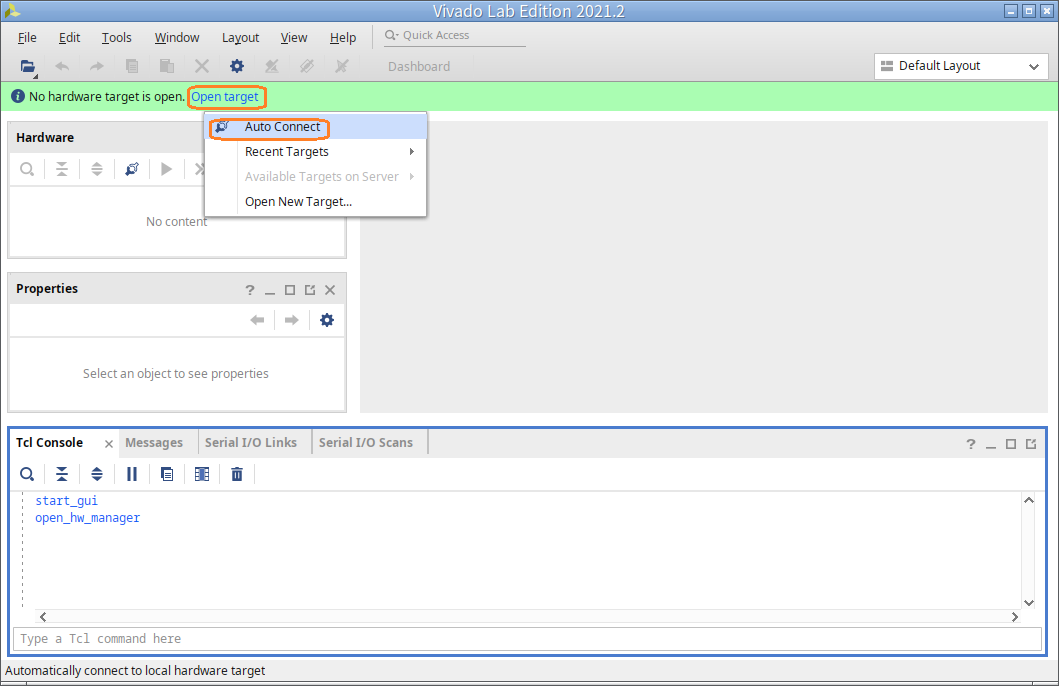
Open TargetとAuto Connectを選択します。PCにボードを複数接続している場合は、Arty A7が選ばれるとは限らないので、Open New Targetを選択してウィザードを進める必要があるかもしれません。
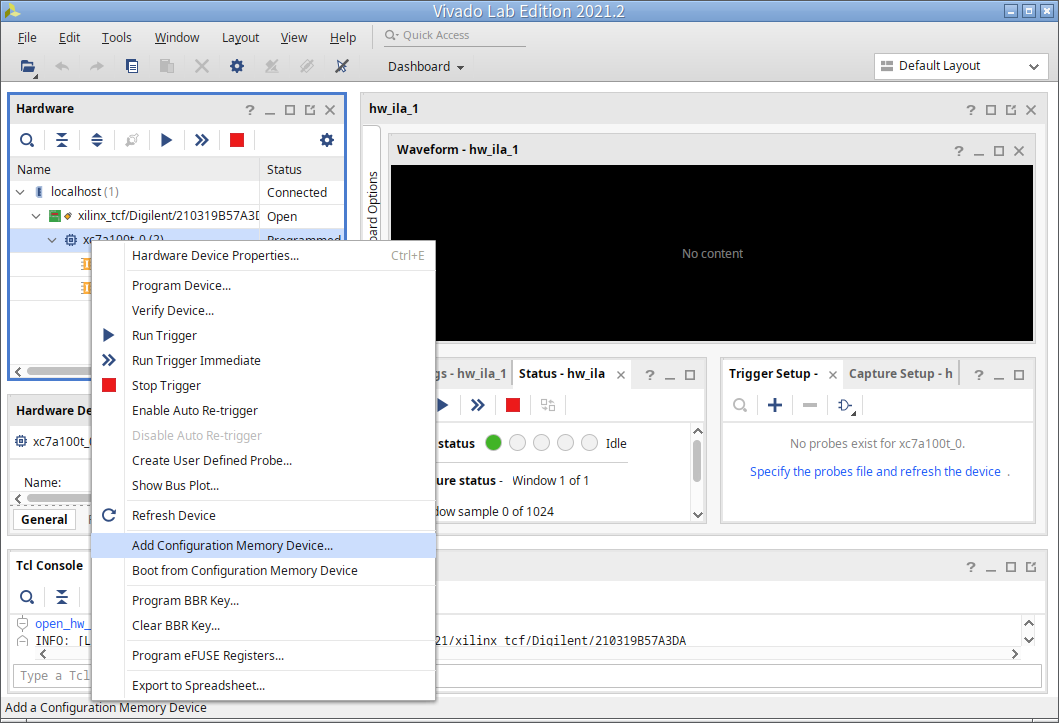
通常FPGAの回路はFPGA内のRAMに書かれるため、揮発性つまり電源を切ると消えます。しかしConfiguration用のSPI Flashに回路を書くと、次回以降のボード電源投入時にFPGAがSPI Flashから自動的に回路をロードしてくれる仕組みです。
Configuration用のSPI Flashに書き込むには、Vivadoに対してボード上のSPI Flash品番を教える必要があります。Add Configuration Memory Deviceを選択しましょう。
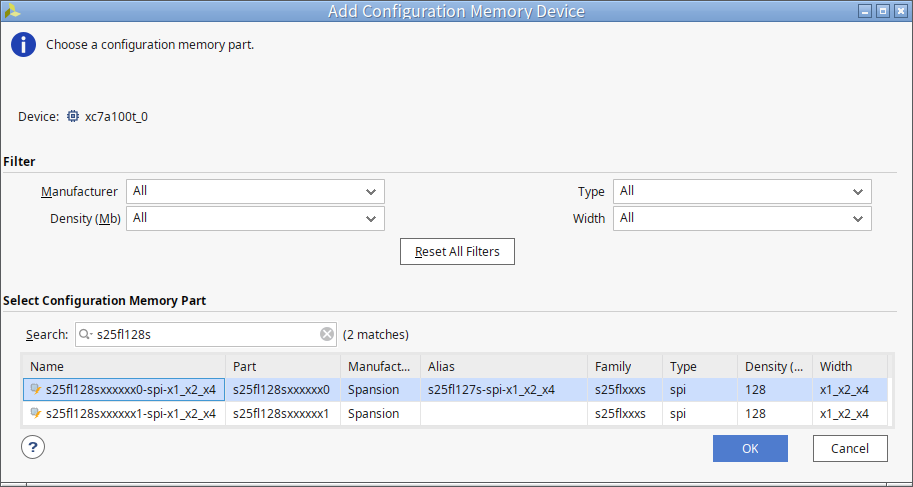
Add Configuration Memory Device
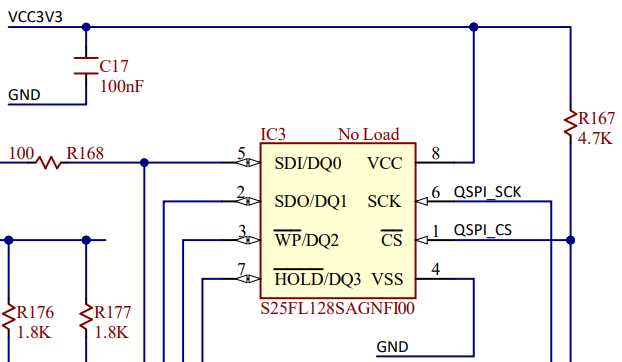
Arty A7のSchematics(回路図)を見るとInfineon TechnologiesのS25FL128Sという型番のSPI Flashが搭載されているようです。VivadoのSearchボックスに型番を途中まで入れると、それらしい選択肢が表示されます。
Configuration Memory Deviceを追加出来たら、Program Configuration Memory Deviceを選択します。ダイアログに回路データ(*.mcs)ファイル名を入れて、FPGAの回路をボード上のSPI Flashに書き込みます。
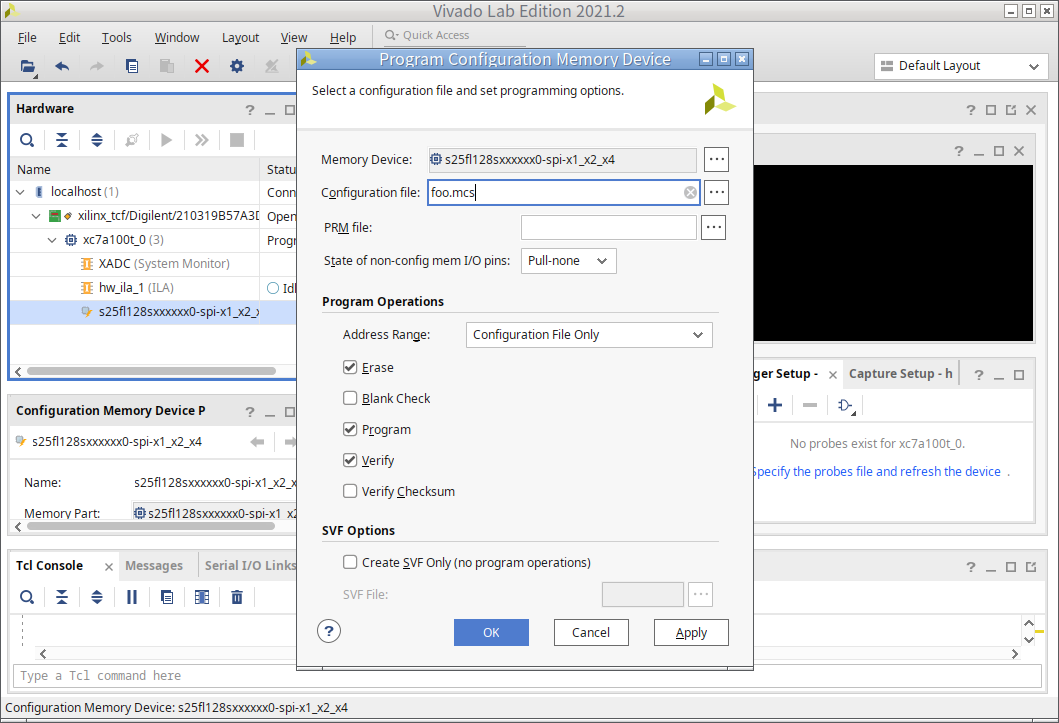
書き込みには数分掛かるはずです。回路データを書き込んだら、ボードの電源を一度切って再投入しましょう。書き込んだ回路データが反映されるはずです。
コメント一覧
- コメントはありません。
この記事にコメントする
2023年4月22日
車のバッテリー完全に死亡
目次: 車
もはや毎年恒例レベルですが、車のバッテリーが完全に干上がって死にました。
電圧は1.5Vでした。乾電池か?
ジャンプスターター購入
自宅の駐車場でバッテリー上がり、などというくだらない理由で幾度となくJAFを呼ぶのがいい加減恥ずかしくなってきたので、先日KashimuraのジャンプスターターKD-238(メーカーサイトへのリンク)を買いました。
ジャンプスターターは車がないと無意味な代物ですが、その点KD-238はモバイルバッテリーとしても使えるので安心です。普通のモバイルバッテリーと比べるとゴツいですが、そこはご愛敬で。
早速買った後にジャンプスタートを試したんですけど、エンジン掛からなかったんですよ……。説明書に「ジャンプスタートは一度に2回までにしておけ」とあったので、素直に従ってその日は諦めました。
再チャレンジ
今日もダメ元で、ジャンプスタートにチャレンジしてみたところ、あっさりエンジンが掛かりました。キーを回す前にアクセルをバシバシ連打したのが良かったんでしょうか?先日も今日もECUのエラーなどは出ていなかったため、原因は皆目見当が付きません。不思議ですね??
エンジン始動直後を見ると、電圧は14V超(充電しているときの電圧)、クランプメーターで電流を見ると2.6Aで、一応バッテリーは充電されているようですが、充電がわずか5分くらいで止まってしまいます。これはダメそう。

さらにバッテリー端子の周りを良く見ると、白い粉を吹いています。雨で濡れた?ような跡にも見えますが、バッテリーの上面にはカバーがあるので雨は掛からないはずです。

これはまさか過放電の影響か何かでバッテリー液漏れしたんでしょうか?もう色々ダメですね。諦めてバッテリー交換か……あーあ。
バッテリー交換
ちょうど今日はスバルのディーラーで半年点検する日だったので、ディーラーに何とかしてもらうために走り始めました。走っている最中にも関わらずバッテリー電圧は非常に不安定で、12Vを突然下回るなど挙動不審です。交差点で止まるとエンジンの回転数が落ちてガタガタとエンストしかけていました。環八でエンストとかやめて、怖い。
当然ながら、ディーラー整備士のお兄さんに「バッテリーがかなり消耗しています、交換をお勧めします」と言われました。ソウデスネ……。素直にバッテリー交換してもらい26,000円くらいの出費でした。痛え出費です。
何回目のバッテリー交換だ
メモにあるだけでも 2007年11月17日、2013年3月20日、2016年7月24日、2020年7月28日、2022年1月10日にバッテリー交換しています。これで6回目です。バッテリーだけで多分20万円くらい無駄にしています。
私は生活サイクル的には、明日いきなり車がなくなっても全く困りません……。でも近所の駐車場は車がたくさん停まっている=つまり東京で車を持って暮らしている人は意外といるようです。みなさん一体何に使っているんでしょうね……??
コメント一覧
- hdkさん(2023/04/24 21:35)
えっ、車は普通に買い物とかお出かけとか色々使いますよね??? 2週間にいっぺんぐらい乗っていれば普通は上がることはないと思いますが...
バッテリーが粉を吹くのは古いバッテリーあるあるですね。あっ、古いわけではないのか、使いすぎてもそうなるんですね。別に粉があっても充電できているバッテリーはあるんですが、さすがに充電されないのは使えませんね :D - すずきさん(2023/04/25 12:45)
いやー、全然使わないんですよね、これが……。駐車場がちょっと遠いのもあって、面倒くさくて歩いてしまいます。
もっと無駄に乗ったほうが良いのかなあ。
この記事にコメントする
| < | 2023 | > | ||||
| << | < | 04 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | - | - | - | - | - | 1 |
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 | - | - | - | - | - | - |
最近のコメント20件
-
 26年7月14日
26年7月14日
hdkさん (07/22 08:37)
「冷却水漏れなんて、修理するまでは補充して...」 -
26年1月23日
すずきさん (01/29 09:48)
「おおー、そんな昔からなんですね。歴史感じ...」 -
26年1月23日
hdkさん (01/27 19:53)
「#! はUNIX v8からだったってWi...」 -
24年12月9日
すずきさん (01/18 15:45)
「Thank you for your i...」 -
24年12月9日
Up2Uさん (01/15 12:57)
「Hi I also find the p...」 -
25年12月18日
すずきさん (12/23 23:51)
「良く見たらksys_read()でfil...」 -
25年12月18日
すずきさん (12/23 23:15)
「ですね、まあpread+readだと話が...」 -
25年12月18日
hdkさん (12/21 08:34)
「昔試しにデバイスドライバーを作ったことが...」 -
25年11月28日
hdkさん (12/04 08:10)
「あれ、停止直前くらいの時のトルクコンバー...」 -
25年11月28日
すずきさん (12/03 11:24)
「トルクコンバーターがいてエンブレは掛かり...」 -
25年11月28日
hdkさん (12/02 08:02)
「"停止直前に急にエンブレがほぼゼロになる...」 -
25年10月6日
すずきさん (10/10 13:14)
「ですね。ccはもはやコンパイラというより...」 -
25年10月6日
hdkさん (10/10 08:27)
「ただのHello, worldでも試して...」 -
25年9月29日
すずきさん (10/03 00:29)
「なんと、メタパッケージ入れてなかったです...」 -
25年9月29日
hdkさん (10/02 06:51)
「あれ、dkmsは自動ビルドされるのが便利...」 -
20年8月24日
すずきさん (08/30 22:06)
「ですね、自分も今はPulseAudioを...」 -
20年8月24日
hdkさん (08/29 09:32)
「ALSA懐かしい... PulseAud...」 -
16年2月14日
すずきさん (08/04 01:31)
「お役に立ったようでしたら幸いです。」 -
16年2月14日
enc28j60さん (08/03 17:40)
「ちょうど詰まっていたところです。\n非常...」 -
25年7月20日
すずきさん (07/30 00:10)
「ギクシャクするのは減速時の2速シフトダウ...」
最近の記事3件
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 2026年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
