 未来から過去へ表示(*)
未来から過去へ表示(*) 2022年12月24日
サンタがマッハ1で街にやってくる(2022年)
目次: サンタ
去年(2021年12月24日の日記参照)と同様に、飛行機の位置をリアルタイムに表示するFlightradar24というサービス(サイトへのリンク)にてサンタが出現しました。クリスマス・イブの日にサンタが出現するのは毎年恒例のお約束演出です。
去年のサンタはおかしくて表示された対地速度は40ktsなのに、サンタの位置から計算した速度はマッハ2 = 1300ktsと変な状態でした。今年は対地速度の表示は727kts(1346.4km/h, マッハ1.1くらい)です。
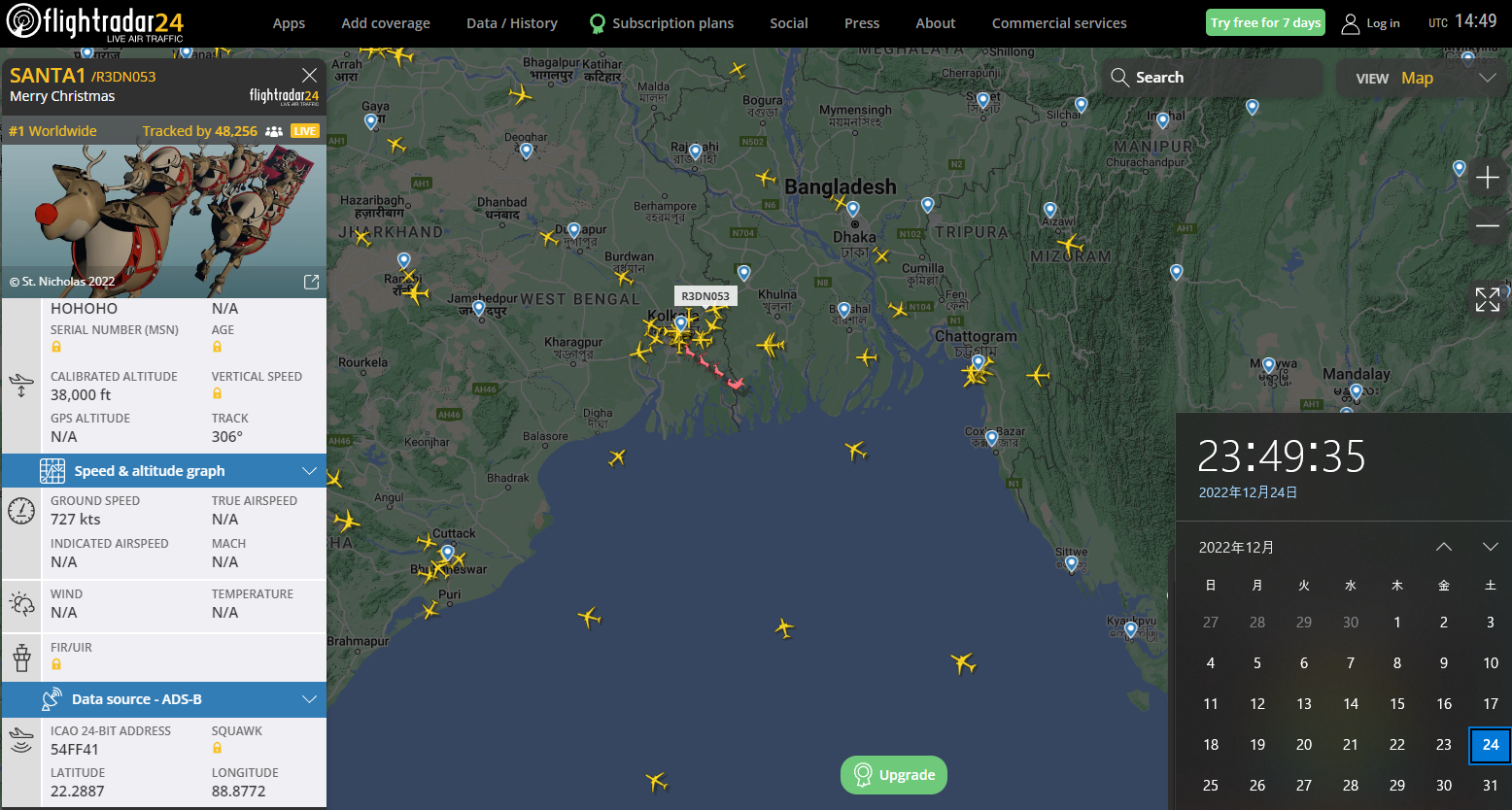
23:49:35時点の位置(緯度22.2887度、経度88.8772度)
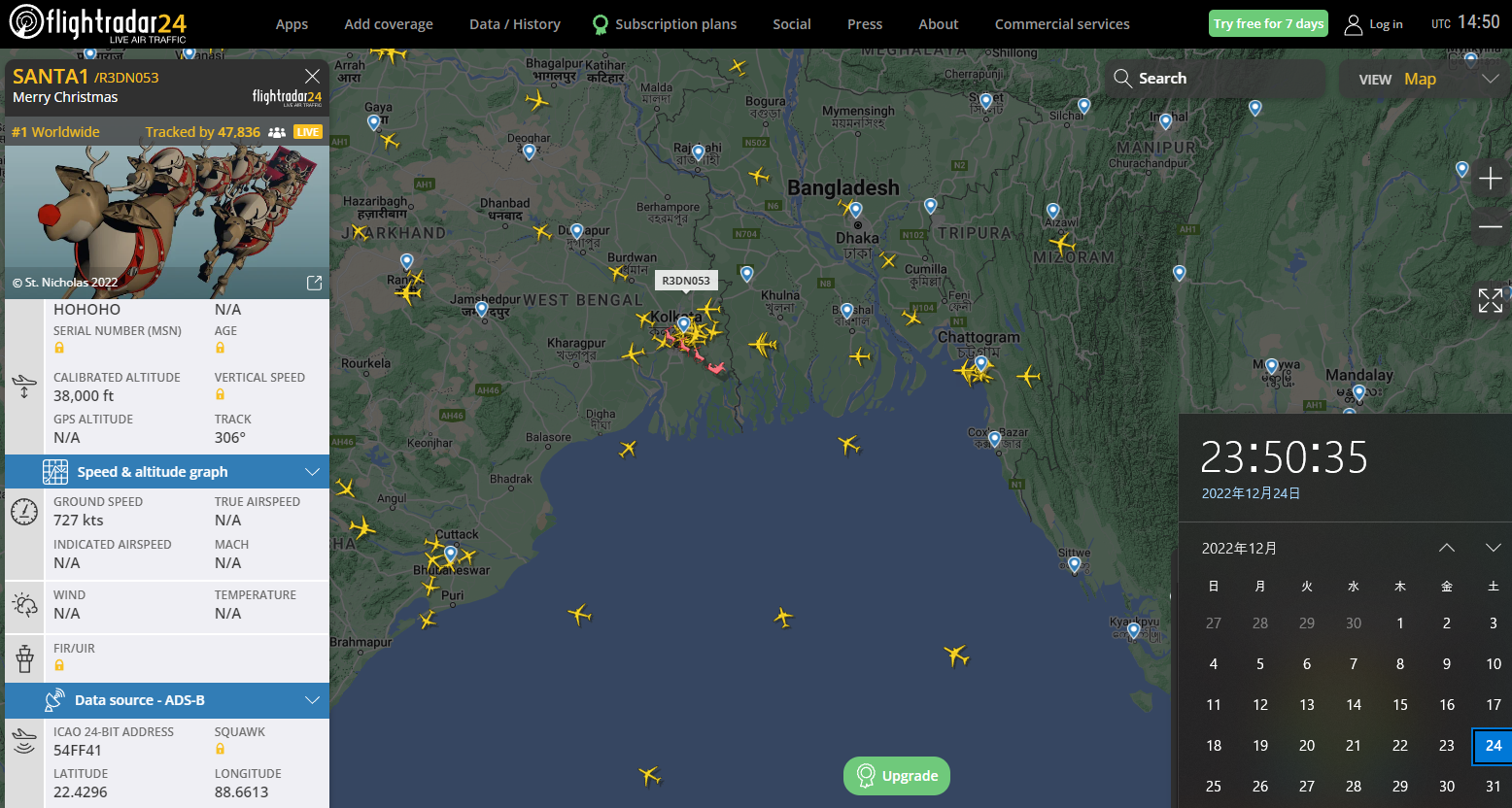
23:50:35時点の位置(緯度22.4296度、経度88.6613度)
去年同様、ある程度の時間をあけ(今回は1分間)でどれくらい進んだか計算します。今回も距離の計算には国土地理院のページを使いました、緯度経度から距離を一発で計算してくれて便利です(サイトへのリンク)。
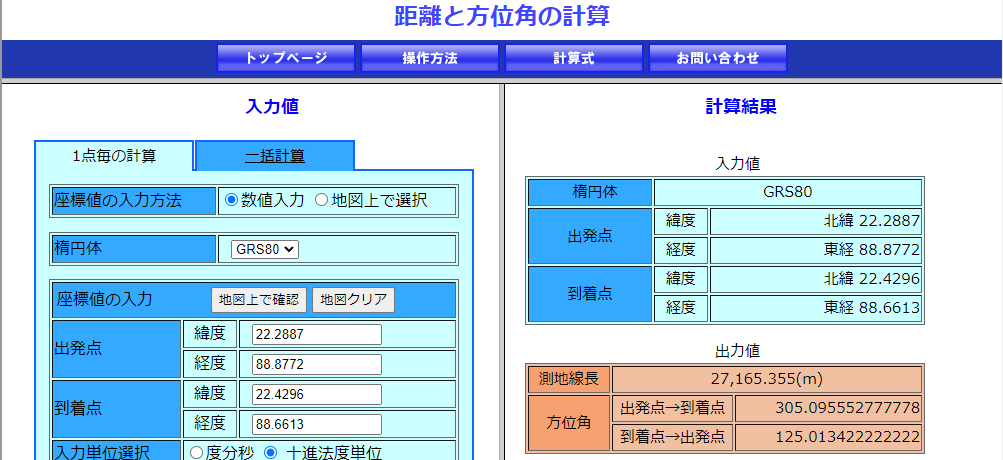
2地点間の距離は約27.2km、時間差は60秒から計算すると、対地速度は約1,630km/hです。地上でのマッハ1.3(ただし、サンタが飛んでいる高さ38,000ftsだとマッハ数はもっと高く出る)です。今年はそんなにずれていないみたいです。改善されましたねw
去年のサンタさんは、実質マッハ2という現代戦闘機+アフターバーナー並みの猛烈な速度で飛んでいましたが、今年はマッハ1.3と大幅にスピードダウンしました。とはいえスーパークルーズ(音速以上の飛行)であり、戦闘機並みの飛行性能であることは変わりありませんね……。来年の速度も気になります。覚えていたらまた計算してみましょう。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2022年12月22日
x86とARMとRISC-VでCoreMark対決
目次: RISC-V
CoreMarkを以前(2019年7月5日の日記参照)測りましたが、ARM系のGCCのバージョンを上げたのと、x86系と、RISC-V系のFU740の計測結果を追加しました。FU540の値は以前のままです。
x86_64
- AMD Ryzen 7 5700X / 3.4GHz Turbo 4.6GHz
- AMD Ryzen 9 3950X / 3.5GHz Turbo 4.7GHz
- AMD Ryzen 9 5900X / 3.4GHz Turbo 4.9GHz
- Intel Core i5 8250U / 1.6GHz Turbo 3.4GHz
- Intel Core i7 6700 / 3.4GHz Turbo 3.8GHz
- Intel Core i9 13900K / P-core: 3.0GHz Turbo 5.5GHz, E-Core: 2.2GHz Turbo 4.3GHz
- Intel Pentium J4205 / 1.5GHz Turbo 2.6GHz
AArch32/AArch64
- Amlogic A311D(Cortex-A73 / 2.2GHz x 4, Cortex-A53 / 1.8GHz x 2)
- Broadcom BCM2837(Cortex-A53 / 1.2GHz x 4, 32bit mode)
- NVIDIA T234 (Jetson AGX Orin 64GB)(Cortex-A78AE / 2.2GHz x 12)
- Renesas RZ/V2H(Cortex-A55 / 1.1GHz x 4)
- Rockchip RK3288(Cortex-A17 / 1.8GHz x 4)
- Rockchip RK3328(Cortex-A53 / 1.3GHz x 4)
- Rockchip RK3399(Cortex-A72 / 1.8GHz x 2, Cortex-A53 / 1.4GHz x 4)
- Rockchip RK3566(Cortex-A55 / 1.6GHz x 4)
- Rockchip RK3588(Cortex-A76 / 2.4GHz x 4, Cortex-A55 / 1.8GHz x 4)
RISC-V
- NSITEXE NS31A(NS31A / 25MHz x 1)
- SiFive FU540(U54-MC / 1.0GHz x 4)
- SiFive FU740(U74-MC / 1.2GHz x 4)
- SpacemiT Key Stone M1(X60 / 1.8GHz x 8)
- StarFive JH7110(U74-MC / 1.5GHz x 4)
動作周波数については後述します。
測定条件と結果
コンパイル条件は下記の通りです。
- AMD Ryzen 7 5700X: GCC-12.2.0 O2
- AMD Ryzen 9 3950X: GCC-7.5.0 Ofast
- AMD Ryzen 9 5900X: GCC-9.4.0 O2
- Intel Core i5 8250U: GCC-11.2.0 Ofast
- Intel Core i7 6700: GCC-9.4.0 Ofast
- Intel Core i9 13900K: GCC-13.3.0 O3
- Intel Pentium J4205: GCC-10.2.1 Ofast
- Amlogic A311D: GCC-9.4.0 Ofast
- NVIDIA T234 (Jestson AGX Orin 64GB): GCC-11.4.0 O2
- Renesas RZ/V2H: GCC-13.2.0 Ofast
- Rockchip RK3588, RK3566, RK3399, RK3328: GCC-10.2.1 Ofast
- Broadcom BCM2837: GCC-8.3.0 Ofast, 32bit
- Rockchip RK3288: GCC-10.2.1 Ofast, 32bit
- NSITEXE NS31A: GCC-12.2.0 Ofast
- SiFive FU740: GCC-10.2.0 Ofast
- SiFive FU540: GCC-8.3.0 Ofast
- SpacemiT Key Stone M1: GCC-13.2.0 Ofast
- StarFive JH7110: GCC-11.3.0 Ofast
Ryzen 7はなぜかO2よりOfastの方が遅かった(O2: 41946, Ofast: 40442)ので、O2の結果を採用しました。RK3399はCA72とCA53の2種類のコアがあるので、taskset 0x1 ./coremarkのように実行するコアを固定して計測しています。
CoreMarkのIterations/Secの結果はCPUの動作周波数の影響を受けてしまうため、CPUの性能比較をする際はIterations/SecをCPU動作周波数で割った値を使うことが多いです。
| SoC (x86) | CPU/micro arch | Iterations/Sec | GHz | CoreMark/MHz | Board/Machine |
|---|---|---|---|---|---|
| Ryzen 9 5900X | Zen 3 | 44345.89800 | 4.7 | 9.435 | |
| Ryzen 7 5700X | Zen 3 | 42040.35874 | 4.6 | 9.139 | |
| Ryzen 9 3950X | Zen 2 | 36140.22407 | 4.5 | 8.031 | |
| Core i9 13900K | Raptor Cove | 49664.76285 | 5.5 | 9.030 | Raptor Lake P-core |
| Core i9 13900K | Gracemont | 36354.82307 | 4.3 | 8.455 | Raptor Lake E-core |
| Core i5 8250U | Cabylake R | 26963.26256 | 3.6 | 7.489 | ThinkPad E480 |
| Core i7 6700 | Skylake | 29237.62883 | 3.8 | 7.694 | |
| Pentium J4205 | Goldmont | 13319.12627 | 2.6 | 5.122 | ASRock J4205-ITX |
| SoC (ARM) | CPU/micro arch | Iterations/Sec | GHz | CoreMark/MHz | Board/Machine |
| T234 | CA78AE | 21278.10483 | 2.2 | 9.671 | Jetson AGX Orin |
| RK3588 | CA76 | 18228.21728 | 2.4 | 7.595 | Radxa ROCK 5B |
| RK3588 | CA55 | 6745.983074 | 1.8 | 3.747 | Radxa ROCK 5B |
| A311D | CA73 | 12491.41215 | 2.2 | 5.677 | Khadas VIM3 |
| A311D | CA53 | 5909.213000 | 1.8 | 3.282 | Khadas VIM3 |
| RK3566 | CA55 | 6023.766497 | 1.6 | 3.764 | Radxa ROCK 3C |
| RZ/V2H | CA55 | 4064.214591 | 1.1 | 3.694 | Yuridenki Kakip |
| RK3399 | CA72 | 10218.15767 | 1.8 | 5.676 | Pine64 ROCKPro64 |
| RK3399 | CA53 | 4622.852300 | 1.4 | 3.302 | Pine64 ROCKPro64 |
| RK3328 | CA53 | 4215.259238 | 1.3 | 3.242 | Pine64 ROCK64 |
| RK3288 | CA17 | 8594.421439 | 1.8 | 4.774 | ASUS tinkerboard |
| BCM2837 | CA53 | 3877.973113 | 1.2 | 3.231 | Raspberry Pi 3B |
| SoC (RISC-V) | CPU/micro arch | Iterations/Sec | GHz | CoreMark/MHz | Board/Machine |
| Key Stone M1 | X60 | 6350.305969 | 1.8 | 3.527 | Milk-V Jupiter |
| JH7110 | U74-MC | 5324.298161 | 1.5 | 3.549 | StarFive VisionFive 2 |
| FU740 | U74-MC | 4134.509372 | 1.2 | 3.445 | SiFive HiFive Unmatched |
| FU540 | U54-MC | 2255.130422 | 1.0 | 2.255 | SiFive HiFive Unleashed |
| NS31A | NS31A | 58.164129 | 0.025 | 2.326 | Local RAM, FPGA(Digilent Arty A7-100T, Xilinx Artix-7) |
やはりx86系CPUの速さは圧倒的です。Ryzen 7は異次元の速さですし、ローエンド向けに思われがちなAtom系コアもARM Cortex-A72を圧倒しています。(12/28追記)Pentium J4205の動作周波数が間違っていた(1.5GHz → 2.6GHz)ので修正しました。
RISC-V勢はFU540(U54-MCコア)はかなり遅く、FU740(U74-MCコア)でやっとRK3328(Cortex-A53コア)などのSoCと並ぶくらいです。FU740を搭載したHiFive UnmatchedはPCと同じホームファクタのMini-ITXを採用しており、NVMe SSDやグラフィックカードが装着できる点などは非常に素晴らしいのですが……、PCの代わりに使用するとなると非力すぎて、RISC-V PCを名乗るにはまだ厳しそうですね。
CPU動作周波数の取得
LinuxでCPUの動作周波数を取得する方法は色々あって、イマイチ統一感がないですけれども、このベンチマークでは下記のようにしています。
- x86系: /proc/cpuinfoのcpu MHz欄
- ARM系: /sys/devices/system/cpu/cpuN/cpufreq/cpuinfo_cur_freq
- RISC-V系: SoC次第
FU740の動作周波数はCore PLL(/sys/kernel/debug/clk/corepll/clk_rateの値 = 1196000000)から得ました。ARM系はCPU周波数が負荷に応じて変化するため、yes > /dev/nullなどを起動してCPUに負荷をかけた状態で見ています。
もし私が何か勘違いしていてCPU動作周波数を間違えているとどうなるかというと、Coremark/MHzが間違った値になります。Iteration/Secは変わりません。
コメント一覧
- コメントはありません。
この記事にコメントする
2022年12月17日
ブライトバンド
今日、東京や千葉で輪のような形で雨が降っていると教えてもらいました。本当だ……不思議な現象ですね。

この現象、調べてみると既に名前がついていて「ブライトバンド」と呼ぶそうです。かっこいい名前ですね。ブライトバンドについてはウェザーニュースの解説が非常にわかりやすかったです(参考: 秋田県の雨雲レーダーに映る 謎のドーナツ型の正体は? - ウェザーニュース)。
詳しくはぜひウェザーニュースの解説を読んでいただきたいですが、簡単に言えばレーダーが融解層(雪→雨に変わる部分)を捉えて過剰に反応している状態で、実際には強い雨が降っているとは限らないとのこと。
動かないブライトバンド、動いてしまう予報
ブライトバンドが出ているときに降水量の過去情報を見ると、ブライトバンドは出たり消えたりするだけで、その場からほとんど動かないことがわかります。

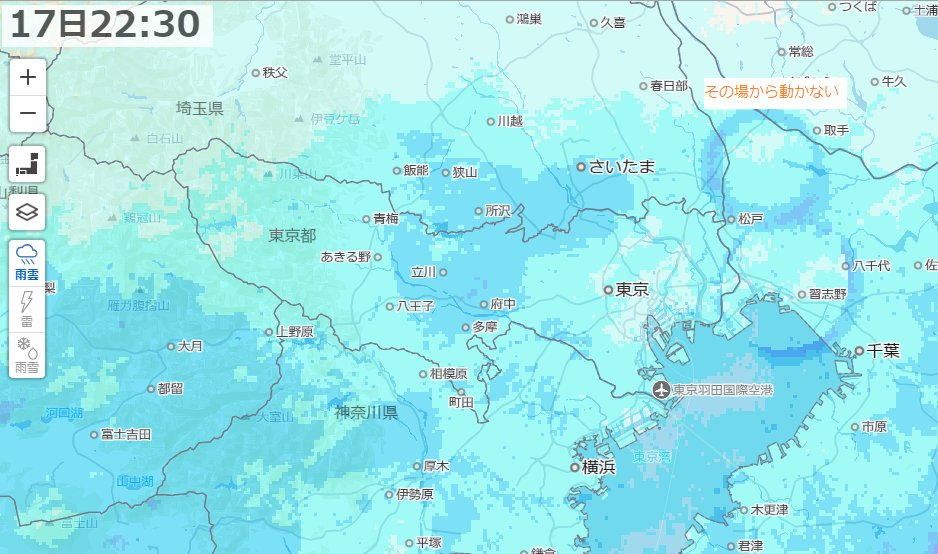
30分経っても移動しない(松戸、取手、習志野の近辺のまま、横浜の輪は消えた)
天気予報システムはブライトバンド=強い雨雲と解釈して予想をするようで、輪が他の雨雲とともに移動するような予報を出しています。気象の専門家ではないので「それが何か問題でも?」に対する答えは持ち合わせていませんが……。

1時間後の予報、輪が移動している(習志野の近辺が右に流れている)
ブライトバンドの付近での局所予報は少し食い違うかもしれませんが、過去情報と予報を見比べても特に破綻しているようには見えませんし、ブライトバンドを雨雲とみなそうが、無視しようが大勢に影響はないのでしょう。
コメント一覧
- コメントはありません。
この記事にコメントする
2022年12月14日
自作OSの紹介その2 - デザイン
目次: 独自OS
最近、趣味&趣味からの発展で仕事でも独自OSを作成しています。独自OSの設計目標は下記の通りです。
- できるだけ軽く、速くしたい
- できるだけ便利、手軽にしたい
- アクセラレータ向けに割り切る(汎用OSは目指さない)
最初の2つの項目は大抵トレードオフですが、3つ目の項目を活かして軽く&便利を両立させることが狙いです。
アプローチ(アクセラレータ側)
「便利、手軽」の実現のため、ソースコードレベルの互換性の確保を目指します。具体的にはLinux用に書かれたソースコードをそのままアクセラレータ用にコンパイル&実行できれば、プログラマから見てLinuxの使い勝手を実現できている、と言えるはずです。
一方で「軽く、速く」を実現するため、Linuxとのソース互換を目指しつつも、アクセラレータ向けに割り切った制限をいくつか設けます。
- 単一バイナリを実行
- ユースケースに由来する制約です。別の仕事をしたいときはアクセラレータで実行するバイナリを切り替えます。
- プロセスは未対応(常に1プロセス)
- 上記とほぼ同じ理由です。アクセラレータ上でマルチプロセスが連携するようなサーバーやGUIを動かしたい人はいないでしょう。
- スレッドは対応
- アクセラレータはマルチコアであることが多いため、スレッドの対応は必須です。
- スレッド数はハードウェアスレッド数を上限とする
- ソフトウェアのソースコード互換を大きく壊す可能性がありますが、機能と速度のバランスを目指しました。アクセラレータは計算が仕事であり、コア数以上のスレッド生成はオーバーヘッドが増え性能が下がるだけです。スレッド数の制御が困難な場合は、スレッドを自動的に扱うライブラリ(OpenMPなど)の利用もありでしょう。
- ファイルシステム、言語対応などの機能は対応しない
- コードサイズの縮小、実装期間の短縮のためです。対応すること自体に問題はないです、が、おそらく要らないと思います。
- MMUや特権モードは使わない
- 連動して動的リンクなども未対応です。将来的には対応するかもしれませんが、必須ではありません。
これらの制限が妥当かどうか?について今は結論は出ないので、実装して使って問題があれば今後修正したいと思います。アクセラレータやOSに詳しい方々の意見も聞いてみたいです。
アプローチ(ホスト側)
アクセラレータに処理を依頼する際のインタフェースはいくつかありますが、いずれも定番ではなさそうです。今回はOpenCL風のAPIを採用しました。OpenCL規格に準拠はしませんが、ある程度(例えばclinfoに応答できる程度)のOpenCL APIを実装します(ホスト側のソースコードのリンク)。
ホストとアクセラレータ間のデータ移動や実行制御の方法も考える必要があります。ホスト側からアクセラレータ側に何か計算を依頼するケースと、もう一つアクセラレータ側のスタンドアローン実行(ホスト側から制御なしでアクセラレータ側のみ単独実行するモード)はデバッグの利便性を考えると、必須に近い機能です。
またホスト側に過度に依存しないように、ホスト側のAPIが気に入らなくなったら別のAPIを実装することができるように、アクセラレータ側の独自OSとは別のリポジトリに分離して実装します。
実現方法
独自にOSを実装する道を選びました。既存のOSSを改造するより実装期間が短く済むと思ったくらいで、独自実装しなければならない強力な理由はないです。個人的な理由も入れて良ければ、独自OS実装に対する興味があったことが大きいです。
RTOSにLinux互換レイヤを積む方法、Linuxをダウンサイズする方法、などでも実現できるのではないでしょうか。Linuxをダウンサイズする方法だとスレッド周りの制約実現が難しいですかね……?やったことがないので何とも言えません。
そんなの簡単にできるよ、という方はぜひOS作成フレンズになりましょう。
コメント一覧
- コメントはありません。
この記事にコメントする
2022年12月13日
コメント一覧
- コメントはありません。
この記事にコメントする
2022年12月12日
自作OSの紹介その1 - 概要
目次: 独自OS
最近、趣味&趣味からの発展で仕事でも独自OSを作成しています。OSと呼ぶほどの機能はありませんが、位置的にはCライブラリよりハード寄りのいわゆるOSレイヤーです(ソースコードへのリンク)。
目的、目標
想定する動作環境は、複数プロセッサで構成されたシステムにおいて、片方がホスト、もう片方がアクセラレータとして動作する環境です。想定する制御方法は、ホスト側で実行したくない、時間がかかる処理をアクセラレータ側に任せて終わるのを待つ、シンプルなユースケースで下記のようになります。
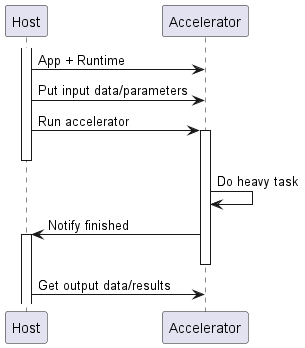
このようなシステムにおいてPC系のプログラマが気軽にアクセラレータ側のソフトウェアを書ける環境が欲しい、という発想から、アクセラレータのプログラマの補助となるようなOSの作成が目的です。
独自OSの設計目標は下記の通りです。
- できるだけ軽く、速くしたい
- できるだけ便利、手軽にしたい
- アクセラレータ向けに割り切る(汎用OSは目指さない)
最初の2つの項目は大抵トレードオフですが、3つ目の項目を活かして軽く&便利を両立させることが狙いです。
既存手法との違い
アクセラレータを動作させるという観点で見れば、わざわざ独自OSを作成せずとも既存のアクセラレータ用言語を使ったり、既存OSの転用でも動作させることができます。
既存のアクセラレータ用言語、CUDAやOpenCLですね。速度は最高だと思います。プログラマ視点から見ると、これら言語の習得には若干手間が掛かります。
LinuxなどPC系OSを転用する場合、使い勝手はPCそのものなので最高でしょう。しかしアクセラレータ向けとしては大規模で大げさでもあり、ハードウェアのリソース特にメモリがかなり必要です。
RTOSを転用するの場合、省メモリかつ大抵の実装は速度も速いです。しかし目的が違う(リアルタイム処理を記述するためのOS)ため、色々なOS独自ルールが存在します。PC系のプログラマには馴染みが薄いです。
| 手法 | 速度 | メモリ | 手軽さ |
|---|---|---|---|
| アクセラレータ用言語 | 〇 | 〇 | × |
| PC系OS(Linuxなど) | △ | × | 〇 |
| RTOS | 〇 | 〇 | △ |
独自OSでは使い慣れたC/C++ 言語が使えて、速さを殺さず、Linuxの使い勝手を可能な限り両立させることを目指します。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2022 | > | ||||
| << | < | 12 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | - | - | - | 1 | 2 | 3 |
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 2026年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
