 未来から過去へ表示(*)
未来から過去へ表示(*) 2024年4月15日
Zephyr SDKのhosttoolsは移動してはいけない、その1 - 移動させると動かなくなる
目次: Zephyr
Zephyr SDKのhosttoolsを移動したらハマったので、メモしておきます。
Zephyr SDKは自前のhosttools(dtcやopenocd、qemuなど)のバイナリを持っていてシステム側のバイナリのバージョンによる不具合などを避けて必要なツールを使うことができます。直接呼び出すことはなくても、westを使っている人は間接的に使っているはずです。
そんな便利なhosttoolsなんですけど、インストールしたパスに強く依存していてディレクトリを移動させると動かなくなります。何が起きるか順に見ましょう。初めにhosttoolsのみをインストールし、dtcを実行します。
hosttoolsをインストール&実行
$ mkdir test $ cd ~/test $ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.5-1/zephyr-sdk-0.16.5-1_linux-x86_64_minimal.tar.xz $ tar xf zephyr-sdk-0.16.5-1_linux-x86_64_minimal.tar.xz $ cd ~/test/zephyr-sdk-0.16.5-1 $ ./zephyr-sdk-x86_64-hosttools-standalone-0.9.sh -y -d ~/test/zephyr-sdk-0.16.5-1 $ ./sysroots/x86_64-pokysdk-linux/usr/bin/dtc --version Version: DTC 1.6.0-dirty
正常動作しました。次にディレクトリを移動して、もう一度dtcを実行します。
移動後は実行できない
$ cd ~/test $ mv zephyr-sdk-0.16.5-1 aaa $ cd ~/test/aaa $ ./sysroots/x86_64-pokysdk-linux/usr/bin/dtc --version bash: ./sysroots/x86_64-pokysdk-linux/usr/bin/dtc: 実行できません: 必要なファイルがありません
バイナリは一切変更していないのに動かなくなってしまいました……。バイナリは同一ですから設定もしくはダイナミックリンク周りが怪しそうです。まずはlddでライブラリ参照パスを見ます。
ダイナミックリンクの依存関係を表示する
$ ldd ./sysroots/x86_64-pokysdk-linux/usr/bin/dtc
linux-vdso.so.1 (0x00007ffd3e302000)
libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007fbd136b2000)
/home/katsuhiro/test/zephyr-sdk-0.16.5-1/sysroots/x86_64-pokysdk-linux/lib/ld-linux-x86-64.so.2 => /lib64/ld-linux-x86-64.so.2 (0x00007fbd138d9000)
ダイナミックリンカー(ld-linux.so)のパスにhosttoolsをインストールしたパスが含まれています。先ほどhosttoolsのディレクトリごと移動してしまったので、リンカーが見当たらないと怒っているようです。
続きはまた今度にします。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2024年4月12日
台湾東部沖地震に寄付
ささやかではありますが台湾東部沖地震に寄付しました。日本の赤十字社→台湾の赤十字(正式名称は中華民国紅十字会)の経路で支援されるようです。

今回調べて初めて知ったのですが、台湾の赤十字社は中国との関係で微妙な位置に立たされているようです。
- 各国の赤十字社、赤新月社は国際赤十字赤新月社連盟(IFRC、平時の支援活動)に加盟し、赤十字国際委員会(ICRC、戦時の支援活動)の統括で活動している
- ICRCの7原則(赤十字の7原則)により、赤十字社は一国に一社と決まっている
- ICRCが台湾の赤十字を承認すると、ICRCが台湾=国と暗に認めることになる
- 台湾は中国の一部と主張する中国にとって大問題
とまあ中国と台湾間の政治問題によるものみたいです。まあ政治問題はさておいて、私は台湾赤十字の支援活動が誠実に行われていると信じて寄付するのみです。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年4月11日
VScodeとAsciiDocとKrokiローカルサーバー
目次: Linux
AsciiDoc ExtensionはAsciiDocのプレビューはもちろんのこと、AsciiDoc文書に埋め込んだMermaidやPlantUMLのような図形作成用言語の画像もプレビュー可能です。
以前のバージョンではローカルにツールをインストールしてプレビュー画像を生成できました(2022年9月4日の日記参照)が、最近のバージョン(おそらく3.1.0以降?)はKroki(Krokiのサイト)による図形描画に変更されたようです。
AsciiDoc Extensionのデフォルト設定だとhttps://kroki.ioにMermaidやPlantUMLのソースコードを送って、画像を受け取る設定になっています。これで問題なければそのまま使用すれば良いですが、外部のサーバーにソースコードを送りたくない場合はローカルにKrokiサーバーを立ち上げることでローカルネットワーク環境で完結することもできます。素晴らしいですね。
Krokiローカルサーバーの設定
Krokiのローカルサーバー立ち上げについてはDockerが便利なようです。Dockerが良い方はそちらを検索してみてください。
今回はKrokiを単体で立ち上げてみます。……と言ってもKroki自体に特に難しいことはなく、公式サイト(Manual Install :: Kroki Documentation)の説明の通りにやればよいです。PlantUMLを表示させたければGraphvizとPlantUMLをインストールした上で、
GraphvizとPlantUMLがインストールされていることの確認
$ which dot /usr/bin/dot $ which plantuml /usr/bin/plantuml
GitHub ReleaseページからダウンロードしたKrokiのJARファイルを起動するだけでサーバーとして機能します。Krokiはサーバー機能を持っていて、動作テストにちょうど良いです。
Krokiの簡易サーバー機能を使う
$ java -jar kroki-standalone-server-v0.25.0.jar \ -DKROKI_LISTEN=0.0.0.0:5000
KROKI_LISTENはどのポートで待ち受けるか?の設定です。PlantUML系の設定は特に何も追加しなくてもPlantUMLを認識していました。これはテスト用の簡易サーバー機能なので、本格的に運用する際はアプリケーションサーバーに登録したほうが良いと思います、その設定はまた今度。
VSCodeの設定
Krokiローカルサーバーを立ち上げたら、VSCodeを設定する必要があります。まずAsciiDoc Extensionの設定を開きます。
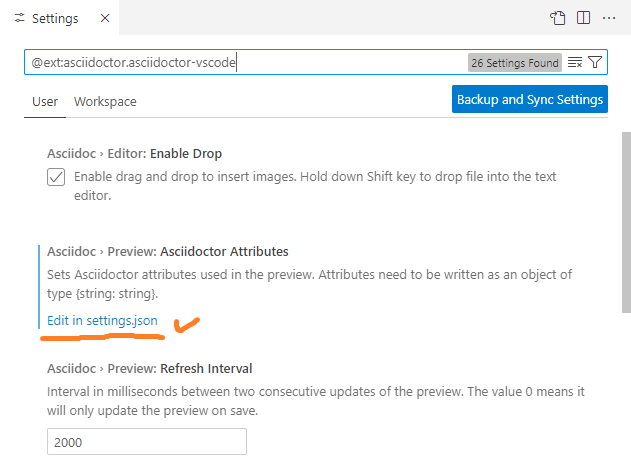
Asciidoc > Preview: Asciidoctor Attributesの項目にある[Edit in setting.json]のリンクを開きます。
設定の最後辺りに、
setting.jsonに追加する設定
"asciidoc.preview.asciidoctorAttributes": {
"kroki-server-url": "http://192.168.1.1:5000"
}
を追加するとローカルサーバーに切り替わるはずです。192.168.1.1の部分はKrokiのローカルサーバーを動作させているIPアドレスを指定します。
見た目が少し違う
ローカルサーバーにて画像生成すると見た目が少し変わります。おそらくですが、インターネット側のKrokiサーバーはデフォルトのデザインを変えていると思われます。下記のAsciidoc文書を入力として確かめます。
動作テストに使ったAsciidoc
This is a sample of PlantUML diagram.
[plantuml]
----
@startuml
box "Box"
participant "App" as app
participant "Library" as lib
endbox
activate app
activate lib
app -> lib : Something()
@enduml
----
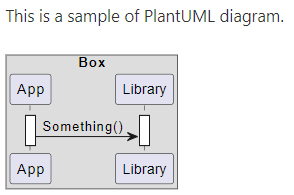
デフォルトつまりインターネット上のKrokiサーバーを使用する場合、このような結果になります。
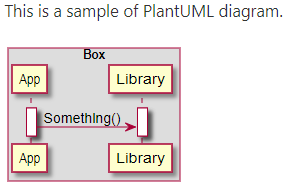
ローカルサーバーを使用する場合、このような結果になります。グレーっぽいデザインから黄色のデザインに変わりました。
Krokiはkroki-standalone-server-v0.25.0.jarで、Krokiを動作させている環境はDebian Testingです。各モジュールのバージョンは、
- plantuml: 1.2020.2
- Graphviz: 2.42.2-8
です。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年4月9日
初めて作ったボード動作せず(手で直した)
目次: Arduino
以前(2024年3月24日の日記参照)発注して、全く動ないうえにNMOSが焼ける(2024年4月3日の日記参照)PCBを直してみました。
まずはミスったNMOS 8個を全部外しました。当初はNMOSをきれいに外して再利用できないか?と考えたんですが、ナメた考えだったことがすぐにわかりました。全然外れません、無理だこれ。
次善策としてNMOSの足を切り破壊しながら外しました。代わりのNMOSはOnSemi BSS138を新たに購入します(秋月で売ってる)。本当はOnSemi BSS123ですけど、高周波とか高圧電流とか厳しい信号ではないしBSS123でもBSS138でも大差ありません。
NMOSを外したら修正します。ミスした箇所はNMOSのピン配置ですから、辻褄が合うようにNMOSを付け直せば良いはずです。
PCB側とNMOS側のピン配置の概略
PCB側が想定しているピン配置(間違い)
Drain 1 | |
| NMOS | 3 Source
Gate 2 | |
NMOS側のピン配置(正しい)
Gate 1 | |
| NMOS | 3 Drain
Source 2 | |
NMOSを裏向きにつけたらどうかとアドバイスも頂いたんですが、ちょうど左周りに60°回転させるとGate/Source/Drainがぴったり合いますので、回転させて付けることにしました。
SOT-23のピン配置は正三角形ではない(1-2間だけ若干狭い)ため、回転させると端子がはみ出してしまいます。私はハンダ付けが上手な訳でもなく、表面実装系の細かいやつは難しいのでハンダをちょっと増やしてごまかします。
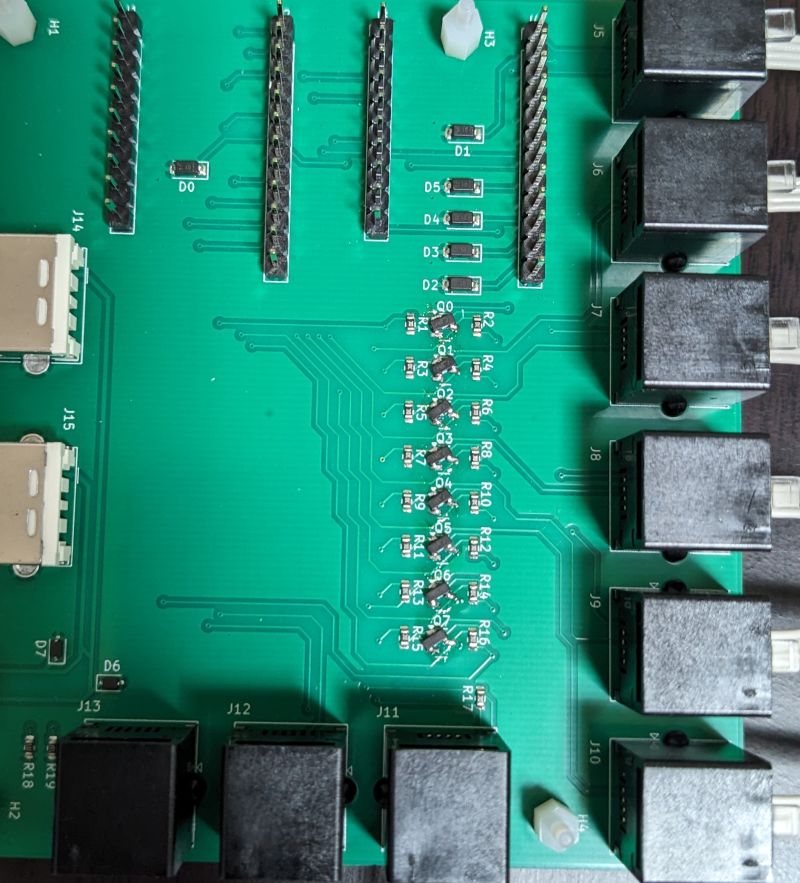
できました。斜めに付いてる違和感がすごいのと芋ハンダだらけで長持ちしなさそうです。そもそも手修理ボードは長期運用するつもりがないから今だけ動いてくれればとりあえずヨシ!!
コメント一覧
- コメントはありません。
この記事にコメントする
2024年4月3日
初めて作ったボード動作せず(燃えた)
目次: Arduino
以前(2024年3月24日の日記参照)発注したPCBが届いたので、動かしてみたら全く動きませんでした。動かないどころか通電したら通常は0.07Aくらいのはずなのに1.5A近い大電流が流れ続け、しばらくしたらNMOSが焼けて煙が出ました。1万円(部品配置込みで$67)のゴミが爆誕……。
PCのUSBを電源にしてM5Stamp C3も繋いでいたので、PCやM5Stampが壊れる可能性もありました。M5Stampはめちゃくちゃ熱くなっていましたが、幸いなことにどちらも壊れずに済みました。M5Stampは強い子ですね。
ミスした箇所を調べると、どうやらKiCadのNMOSのピン配置と、部品で使ったNMOS(Onsemi BSS-123)のピン配置が違うのが原因のようです。
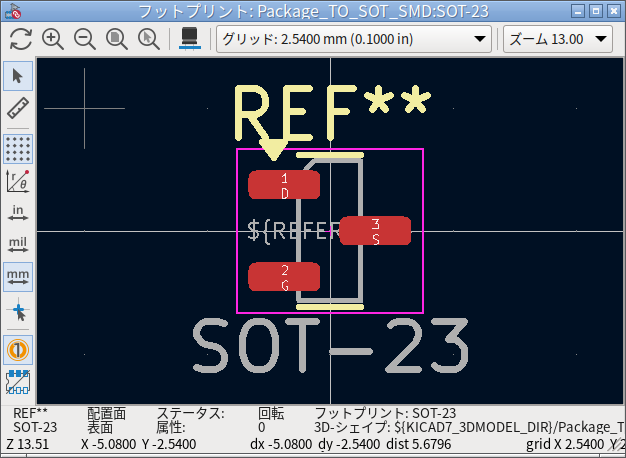
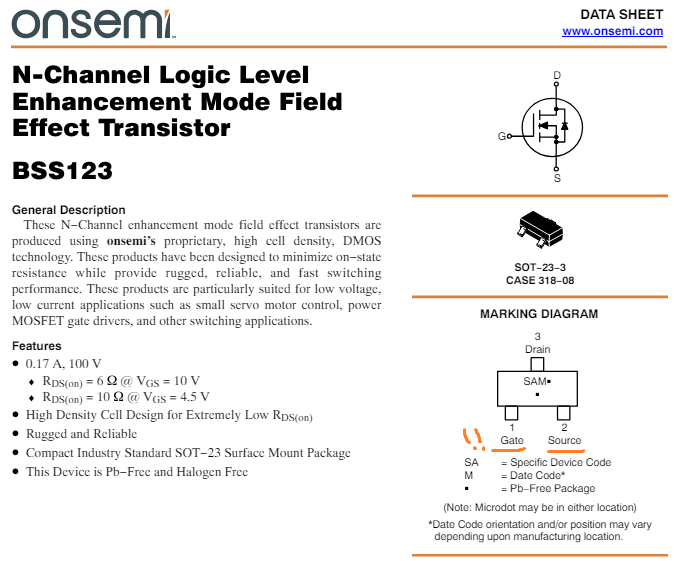
KiCadは1番ピンがドレイン、BSS-123は1番ピンがゲートなのでゲートとソース/ドレインを逆接続した回路になってしまったということです。Vcc 3.3VとGPIOが短絡していて、GPIOをGNDに繋いだり、GPIOをOutput Lowレベルにすると電源とGNDがショートする危険な状態になっていました。そりゃあNMOSも焼けますよね。これは気づかなかったなあ……。
コメント一覧
- コメントはありません。
この記事にコメントする
2024年4月2日
KiCadが動かなくなったのでビルド
目次: Arduino
Debian Testingなマシンをapt-get upgradeしたところKiCadが動かなくなりました。正確に言うとアプリ自体は動作しますがフットプリントライブラリをロードするとエラーになります。
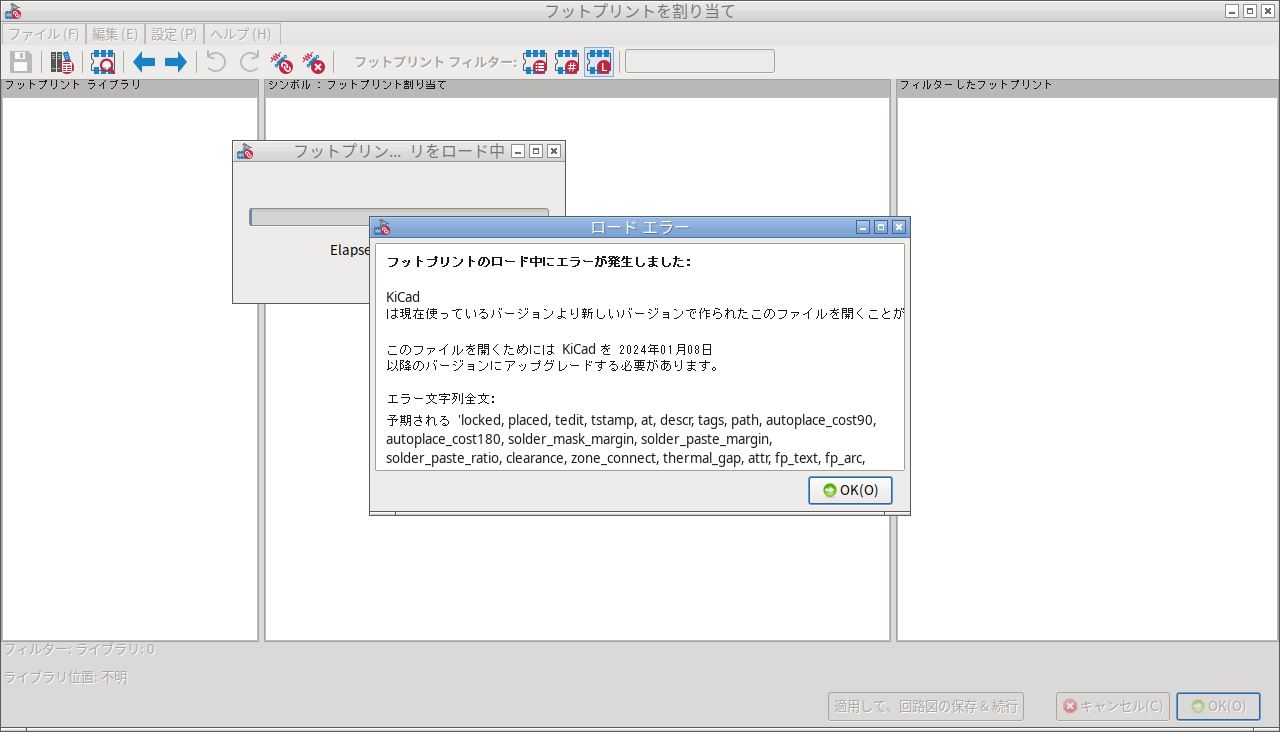
検索のために先頭のエラーメッセージのみ転記しておきます。
エラーメッセージの先頭部分
フットプリントのロード中にエラーが発生しました: KiCad は現在使っているバージョンより新しいバージョンで作られたこのファイルを開くことができません。 このファイルを開くためには KiCad を 2024年01月08日 以降のバージョンにアップグレードする必要があります。 エラー文字列全文: 予期される 'locked, placed, tedit, tstamp, at, descr, tags, path, autoplace_cost90, autoplace_cost180, solder_mask_margin, solder_paste_margin, solder_paste_ratio, clearance, zone_connect, thermal_gap, attr, fp_text, fp_arc, fp_circle, fp_curve, fp_line, fp_poly, fp_rect, pad, zone, group, generator, version or model' ソース '/usr/share/kicad/footprints//Connector_HDMI.pretty/HDMI_A_Kycon_KDMIX-SL1-NS-WS-B15_VerticalRightAngle.kicad_mod', 行 4, オフセット 3.
パッケージを見るとKiCad(kicad)のバージョンが7.0.11なのに、フットプリントライブラリ(kicad-footprints)だけ8.0.1になっています。変ですねえ。
kicadとkicad-footprintsのバージョン
$ dpkg -l | egrep 'kicad |kicad-footprints ' ii kicad 7.0.11+dfsg-1 amd64 Electronic schematic and PCB design software ii kicad-footprints 8.0.1-1 all Footprint symbols for KiCad's Pcbnew
放っておいてもそのうち是正されると思いますが、良い機会なのでKiCadを自分でビルドしてみたいと思います。
KiCadのビルド方法
Ubuntu 22.04でのビルド方法を示します。
KiCadのビルド方法
$ apt-get install git cmake gcc g++ ninja-build
$ apt-get install libglew-dev libcurl4-openssl-dev libcairo2-dev \
libboost-dev libboost-locale-dev libboost-test-dev libboost-filesystem-dev \
libharfbuzz-dev libprotobuf-dev protobuf-compiler swig \
libpython3-dev python3-wxgtk4.0 libgtk-3-dev \
libglm-dev libgit2-dev libngspice0-dev \
libocct-draw-dev libocct-ocaf-dev libocct-visualization-dev \
libocct-data-exchange-dev \
wx3.0-headers libwxgtk3.0-gtk3-dev unixodbc-dev libsecret-1-dev
$ git clone https://gitlab.com/kicad/code/kicad
$ git reset --hard 7.0.1
$ git clone https://gitlab.com/kicad/libraries/kicad-footprints
$ git reset --hard 7.0.1
$ git clone https://gitlab.com/kicad/libraries/kicad-symbols
$ git reset --hard 7.0.1
$ git clone https://gitlab.com/kicad/libraries/kicad-packages3D
$ git reset --hard 7.0.1
$ cd kicad
$ cmake -G Ninja ./ -B build -DCMAKE_INSTALL_PREFIX="/path/to/kicad/___"
$ ninja -C build
$ ninja -C build install
#### footprintライブラリをインストール先のshare/kicad/footprintsにコピーする
#### フットプリントエディターで正しく部品がロードできればOK
$ cd ../
$ cp -a kicad-footprints /path/to/kicad/___/share/kicad/footprints
#### symbolsライブラリをインストール先のshare/kicad/symbolsにコピーする
#### シンボルエディターで正しく部品がロードできればOK
$ cd ../
$ cp -a kicad-symbols /path/to/kicad/___/share/kicad/symbols
#### symbolsライブラリをインストール先のshare/kicad/3dmodelsにコピーする
#### 3Dビューアーで部品が表示されればOK
$ cd ../
$ cp -a kicad-packages3D /path/to/kicad/___/share/kicad/3dmodels
Debian Testingの場合はKiCad 7.0.11を使うとよいです。wx3.0ではなくwx3.2であることと、一部パッケージ名が違う場合があります。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2024 | > | ||||
| << | < | 04 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | 1 | 2 | 3 | 4 | 5 | 6 |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | - | - | - | - |
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 2026年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
