2026年6月11日
ZephyrのOut-of-treeアプリケーションその5 - OpenOCDとGDBで実行
目次: Zephyr
前回ZephyrのOut-of-treeアプリがビルドできました。今回は実行と実行結果の確認です。あえてwestに頼らずOpenOCDとGDBで殴っていくスタイルで行きます。OpenOCDのビルド方法は以前(2026年6月2日の日記参照)紹介したのでそちらをご覧ください。使用機材は下記のとおりです。
- ボード: STMicroelectronics NUCLEO-F446RE
- デバッガ: NUCLEOのオンボードチップ(ST-Link)
PCとボードをUSB接続します。NUCLEOにはデバッガがオンボードで搭載されています。ボードのUSBコネクタ(CN1)は給電兼、デバッガの接続用です。NUCLEOは切り込みに沿ってボードを折るとデバッガ部分を物理的に切り離せるようになっていて、面白いですね。よく考えられているな〜と思います。
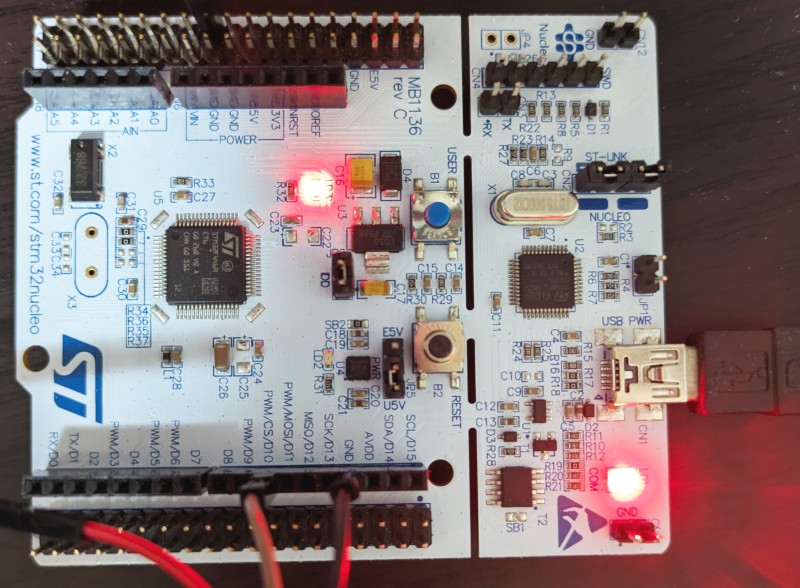
NUCLEO-F446RE、左側がメインSoC、右側がデバッガ
OpenOCDはオプション-fでデバッガやデバッグ対象の設定ファイルを指定します。今回はST-Link(interface/stlink.cfg)とSTM32F4系(target/stm32f4x.cfg)の設定ファイルを指定します。
オプション-cは起動時に実行するコマンドを指定します。"bindto 0.0.0.0"は他のマシンからの接続を受け付けるためのコマンドで、OpenOCDを実行するマシンとZephyrをビルドするマシンが同じ場合は省略してOKです。"init; reset halt"は初期化後にボードをリセットしてCPU停止状態にしておくために指定しています。要らないはずなんですが、なぜか接続できないときがあるんですよねー。なんでだろ?
OpenOCDの起動コマンド例
$ cd openocd/tcl $ sudo ../src/openocd -f interface/stlink.cfg -f target/stm32f4x.cfg -c 'bindto 0.0.0.0' -c 'init; reset halt'
GDBはARM用ならOKですが、Zephyr SDKにあるarm-zephyr-eabi-gdbを使うのが手軽でしょう。バイナリのパスはビルドしたOut-of-treeアプリ(build/zephyr/zephyr.elf)を指定します。
GDBの起動とアプリ実行のためのコマンド例
$ cd work_dir/hello $ ../zephyr-sdk/gnu/arm-zephyr-eabi/bin/arm-zephyr-eabi-gdb build/zephyr/zephyr.elf target remote :3333 monitor reset halt load c
GDBが起動したらtargetコマンドでOpenOCDに接続し、リセット(monitor reset halt)、ロード(load)、コンティニュー(c)すればアプリが実行開始されます。これでやっとHello, World!を拝め……ません。まだNUCLEO-F446REのシリアル出力を見る方法を説明していないからです。
続きは次回。
コメント一覧
- コメントはありません。
 この記事にコメントする
この記事にコメントする
2026年6月8日
ZephyrのOut-of-treeアプリケーションその4 - 最小限のアプリ
目次: Zephyr
便利ツールwestとZephyr SDKをインストールしました。やっとOut-of-treeアプリケーション作成の説明ができます。基本的にはZephyr Example Applicationを見たら良いですけど、機能満載すぎてどこ見たら良いかわからんと思うので、最低限必要な要素だけを1つずつ組み立てて紹介します。
westのマニフェスト
最初にwestのマニフェストを作ります。これがないとwest initができません。マニフェストではwestのカスタムコマンドを定義できますが、今は要らないのでzephyr本体だけ記述します。
hello/west.yml
manifest:
remotes:
- name: zephyrproject-rtos
url-base: https://github.com/zephyrproject-rtos
projects:
- name: zephyr
remote: zephyrproject-rtos
revision: v4.4.0
import:
name-allowlist:
- cmsis_6
- hal_stm32
今回はST-Microのnucleo F446REボードを使いますので、Cortex-M用にcmsis_6とhal_stm32をallowlistに入れました。
west initとその他の設定
$ cd work_dir $ west init -l hello $ west update $ west zephyr-export $ west packages pip --install
チュートリアルに紹介されているコマンドは-m URLオプションでリモートのGitリポジトリを指定する方法でした。これはこれで便利ですが、なんでもかんでもGitHubにアップロードするのも面倒です。今回は-lオプションでローカルディレクトリを指定する方法を使います。
もし間違えてしまったら.westディレクトリを全て消してwest initからやり直せば良いです。zephyr-exportとpackages pip --installは1回やればもうやらなくていいはず。たぶん。
最低限のアプリケーション
アプリケーションの骨組みを作ります。ディレクトリ名は何でも良いですが、ここではhello/appとします。CMakeLists.txt, Kconfig, prj.confとmain.cを作ります。
hello/app/CMakeLists.txt
cmake_minimum_required(VERSION 3.13.1)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(app LANGUAGES C)
target_sources(app PRIVATE src/main.c)
hello/app/Kconfig
menu "Zephyr"
source "Kconfig.zephyr"
endmenu
hello/app/prj.conf
(空っぽでOK)
hello/app/src/main.c
#include <zephyr/kernel.h>
int main(void)
{
printk("Hello, World!\n");
return 0;
}
作成し終わったらビルドします。
Out-of-treeアプリのビルド
$ cd work_dir/hello
$ west build -b nucleo_f446re app
[158/158] Linking C executable zephyr/zephyr.elf
Memory region Used Size Region Size %age Used
FLASH: 17136 B 512 KB 3.27%
RAM: 4480 B 128 KB 3.42%
BACKUP_SRAM: 0 B 4 KB 0.00%
SRAM0: 0 B 128 KB 0.00%
IDT_LIST: 0 B 32 KB 0.00%
Generating files from /home/ubuntu/work_dir/hello/build/zephyr/zephyr.elf for board: nucleo_f446re/stm32f446xx
もし下記のような既にconfig済だぞ!みたいなエラーで怒られるときは、
config済みエラー
ERROR: Build directory /home/ubuntu/work_dir/hello/build targets board nucleo_f446re, but board warp7 was specified. (Clean the directory, use --pristine, or use --build-dir to specify a different one.) FATAL ERROR: refusing to proceed without --force due to above error
ビルド生成物(buildディレクトリ)を全削除してからやり直してください。最小アプリであればビルドにさほど時間はかかりませんし、毎回buildディレクトリを削除してフルビルドするストロングスタイルでもいいと思います。以上がうまくいっていたら、ディレクトリはこうなっているはずです。
作業ディレクトリの状態
work_dir |-- .venv |-- .west |-- hello |-- modules |-- zephyr `-- zephyr-sdk-1.0.1
ビルドできたら実行したいですね。続きはまた今度。
コメント一覧
- コメントはありません。
この記事にコメントする
2026年6月2日
OpenOCDのビルド2026
目次: OpenOCD
以前(2023年6月28日の日記参照)紹介したときからビルド方法が変わったかも?と思ったらそんなことはなく同じでした。コードはSourceForgeのGitリポジトリが本家ですが、GitHubにも公式ミラー(OpenOCD GitHub公式ミラー)があります。気のせいかもしれませんが、GitHubの方が速い気がします。
今回はUbuntu 24.04のDockerイメージからビルドしてみます。
Docker起動、依存パッケージインストール
$ docker run -it ubuntu:24.04 /bin/bash
# apt-get update
# apt-get install -y git gcc g++ autoconf automake libtool pkg-config make \
libusb-1.0-0-dev libhidapi-dev libgpiod-dev libftdi1-dev
以下、Docker内で実行する場合はrootユーザーなのでプロンプトの先頭は#ですが、一般ユーザーで実行しても一緒なのでプロンプトの先頭は$で表記します。
リポジトリ取得、初期化、configure
$ git clone https://git.code.sf.net/p/openocd/code openocd-code $ cd openocd-code $ git submodule init Submodule 'jimtcl' (https://github.com/msteveb/jimtcl.git) registered for path 'jimtcl' Submodule 'src/jtag/drivers/libjaylink' (https://gitlab.zapb.de/libjaylink/libjaylink.git) registered for path 'src/jtag/drivers/libjaylink' $ git submodule update --recursive $ bootstrap $ ./configure --enable-internal-jimtcl --enable-internal-libjaylink OpenOCD configuration summary --------------------------------------------------- ... CoreSight Direct Memory yes (auto) Linux GPIO bitbang through sysfs yes (auto) Remote Bitbang driver yes (auto) SEGGER J-Link Programmer yes (auto) Xilinx XVC PCIe and AXI drives yes (auto) Bus Pirate yes (auto) ...
基本的にOpenOCDのconfigureは依存ライブラリを発見すると関連機能を自動的に有効にしますから、特に何も指定する必要がありません。が、今回は下記を指定します。
- --enable-internal-libjaylink: OpenOCDが内蔵しているlibjaylinkを使用
- --enable-internal-jimtcl: OpenOCDが内蔵しているjimtclを使用
ディストリビューション提供のlibjaylinkやjimtclを使っても構わないですが、Ubuntu 20.04のような古めのディストリビューションを使っている場合はバージョンが合わないので内蔵のライブラリを使うと良いです。
OpenOCDはconfigureのオプションを打ち間違っても怒らずにそのまま進んでしまうので、configureの最後に表示されるconfiguration summaryのSEGGER J-Link Programmerがyesになっているか確認しましょう。
ビルド、動作確認
$ make -j8
$ ./src/openocd --version
Open On-Chip Debugger 0.12.0+dev-01537-ge6752ecbc (2026-06-02-00:00)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
うまくいったようです。良かった良かった。
コメント一覧
- コメントはありません。
この記事にコメントする
2026年5月31日
ZephyrのOut-of-treeアプリケーションその3 - Zephyr SDKのインストール
目次: Zephyr
前回はPythonとwestの準備をしました。今回はZephyrをビルドするツールzephyr-sdkをインストールします。基本的にはZephyr SDKにあるとおりです。westを使える方はwestで良いですが詰みやすい(※)ので、インストーラを使う方法も知っておいて損はないでしょう。
SDKのバージョンは何でも良い訳ではなくZephyr Version Compatibilityにある通り、SDKのバージョンによってサポートしているZephyrのバージョンが違うのでご注意ください。
今回はSDK 1.0系とZephyr 4.4.0を使いましたが、特に理由はないので必要に応じて適切なバージョンを選んでください。
Zephyr-SDKのインストール
$ mkdir work_dir $ cd work_dir $ tar xf zephyr-sdk-1.0.1_linux-x86_64_minimal.tar.xz $ cd zephyr-sdk-1.0.1 Install GNU toolchain [y/n]? y Install GNU toolchains for all targets [y/n]? y → この問いにnと答えると、アーキテクチャごとに要るか/要らないかを聞かれるので、 要るものだけにyと答えると時間節約になります。 Install LLVM toolchain [y/n]? y Install host tools [y/n]? y Register Zephyr SDK CMake package [y/n]? y Create symbolic links for old Zephyr bisectability [y/n]? y → 以前はSDK直下にアーキテクチャのディレクトリ(例: x86_64-zephyr-elf)がありましたが、 llvmが導入されてgnu/以下に移動しました。 昔のディレクトリ構造を期待する古いZephyrを使うなら、yと答えてシンボリックリンクを作っておいたほうが良いです。
基本は全部yと答えれば良いはずです。インストール時間を短くしたい人は"Install GNU toolchains for all targets"にnと答えて要るものだけに絞りましょう。
(※)west sdk installでもインストールできますが、westだと何が起きたのか全くわかりません。成功するうちは良いものの、いざ失敗するとどうしようもなくなります。
Zephyr SDKをローカルディレクトリに置く場合
Zephyr SDKを/optや/usr/localなどに置く場合はZephyrのビルドシステムが勝手にSDKを探してくれます。もし別の場所に置きたい場合はもうひと手間必要です。ホームディレクトリに下記の.zephyrrc設定ファイルを作ります。
設定ファイル~/.zephyrrc
export ZEPHYR_TOOLCHAIN_VARIANT=zephyr
export ZEPHYR_SDK_INSTALL_DIR=/home/ubuntu/work_dir/zephyr-sdk-1.0.1
設定を反映させるため、zephyrのディレクトリにあるzephyr-env.shをsourceで取り込みます。
設定の反映
$ cd work_dir/zephyr $ source zephyr-env.sh
先ほど作った設定ファイルの内容が環境変数に反映されていれば成功です。
設定の確認
$ env | grep -i zephyr ZEPHYR_BASE=/home/ubuntu/work_dir/zephyr PWD=/home/ubuntu/work_dir/zephyr ZEPHYR_TOOLCHAIN_VARIANT=zephyr ZEPHYR_SDK_INSTALL_DIR=/home/ubuntu/work_dir/zephyr-sdk-1.0.1 PATH=/home/ubuntu/work_dir/zephyr/scripts:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin
注意点は、シェルを終了させると環境変数が消えてしまうことです。したがってシェルを立ち上げる度に、
再びビルド環境を使うときの手順
$ cd work_dir $ source .venv/bin/activate $ cd zephyr $ source zephyr-env.sh
を実行する必要がありまして面倒です……。手間なく設定する方法がありそうなので、ご存じの方は教えてくださいませ。以上がうまくいっていたら、ディレクトリはこうなっているはずです。
作業ディレクトリの状態
work_dir |-- .venv `-- zephyr-sdk-1.0.1
またセットアップだけで話が終わってしまいました。Zephyrは本題に至るまでが遠いです。次こそアプリを作ります。
コメント一覧
- コメントはありません。
この記事にコメントする
| < | 2026 | > | ||||
| << | < | 06 | > | >> | ||
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| - | 1 | 2 | 3 | 4 | 5 | 6 |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | - | - | - | - |
最近のコメント5件
最近の記事20件
-
 20年2月22日
20年2月22日
すずき (06/26 02:03)
「[Zephyr - まとめリンク] 目次: Zephyr導入、ブート周りHello! Zephyr OS!!Hello! Ze...」 -
26年6月18日
すずき (06/26 02:02)
「[ZephyrのOut-of-treeアプリケーションその6 - シリアル出力] 目次: Zephyr前回はシリアルに文字を出...」 -
26年6月23日
すずき (06/26 01:27)
「[ANA国内線予約サイトが悲惨なことに] 4月くらいにANAの国内線予約サイトが国際線と共通のクラウドシステム(Amadeus...」 -
26年6月11日
すずき (06/26 01:10)
「[ZephyrのOut-of-treeアプリケーションその5 - OpenOCDとGDBで実行] 目次: Zephyr前回Ze...」 -
26年4月29日
すずき (06/24 01:10)
「[ぽこあポケモンをクリア] 目次: ゲーム1日だけやって放置していたぽこあポケモンをクリア(=スタッフロールが流れるイベントを...」 -
26年5月3日
すずき (06/24 01:09)
「[農家はREPLACE()されました、を9割クリア] 目次: ゲーム大昔にちょっとだけやって中断していたゲーム「農家はREPL...」 -
26年5月31日
すずき (06/24 01:08)
「[ZephyrのOut-of-treeアプリケーションその3 - Zephyr SDKのインストール] 目次: Zephyr前...」 -
26年6月8日
すずき (06/23 03:22)
「[ZephyrのOut-of-treeアプリケーションその4 - 最小限のアプリ] 目次: Zephyr便利ツールwestとZ...」 -
23年5月15日
すずき (06/23 03:07)
「[車 - まとめリンク] 目次: 車三菱 FTO GPX '95の話。群馬県へのドライブ1群馬県へのドライブ2将来車を買い替え...」 -
26年4月8日
すずき (06/23 03:07)
「[ジャガーさんのエンジンオイル交換、後日談] 目次: 車昨日、ジャガーXEのオイルを交換しました。オートバックスでも家の駐車場...」 -
26年5月28日
すずき (06/23 02:29)
「[ZephyrのOut-of-treeアプリケーションその2 - westの準備] 目次: ZephyrZephyrのアプリケ...」 -
26年5月22日
すずき (06/23 02:20)
「[ZephyrのOut-of-treeアプリケーションその1 - 概要] 目次: ZephyrZephyr RTOSはツリー内...」 -
21年7月10日
すずき (06/02 21:25)
「[OpenOCD - まとめリンク] 目次: OpenOCDOpenOCDとHiFive UnleashedのSPI Flas...」 -
26年6月2日
すずき (06/02 21:25)
「[OpenOCDのビルド2026] 目次: OpenOCD以前(2023年6月28日の日記参照)紹介したときからビルド方法が変...」 -
22年3月18日
すずき (05/28 01:34)
「[射的 - まとめリンク] 目次: 射的ガスガン その1ガスガン その2ガスガンが増えました射的射的2回目射的3回目東京マルイ...」 -
26年5月24日
すずき (05/28 01:34)
「[JTSA Unlimited大会参加2026] 目次: 射的JTSA Unlimitedの大会に参加しました。「水」ステージ...」 -
26年5月16日
すずき (05/21 02:14)
「[「かに」で終わる形容動詞] Xで50音順に「かに」で終わる形容動詞(正確には連用形ですが)を並べている人がいて、面白そうなの...」 -
21年12月28日
すずき (05/06 19:21)
「[ゲーム - まとめリンク] 目次: ゲームNintendo DSを買ったパネルでポンDS最近の朝はパネポンDS聖剣伝説DSチ...」 -
26年4月7日
すずき (04/07 23:02)
「[ジャガーさんのエンジンオイル交換] 目次: 車買ってから6,000kmくらい走ったのでエンジンオイル&オイルフィルターを交換...」 -
26年2月8日
すずき (04/07 21:51)
「[ジャガーさんの修理……のはずが雪] 目次: 車以前(2025年11月21日の日記参照)、ジャガー...」
こんてんつ
wiki Linux JM Java API過去の日記
2002年 2003年 2004年 2005年 2006年 2007年 2008年 2009年 2010年 2011年 2012年 2013年 2014年 2015年 2016年 2017年 2018年 2019年 2020年 2021年 2022年 2023年 2024年 2025年 2026年 過去日記についてその他の情報
アクセス統計 サーバ一覧 サイトの情報
合計:
本日:
